 В зависимости от вида и уровня развития ОС различные частные сенсорные и эффекторные подсистемы могут быть развиты в большей или меньшей степени или вовсе отсутствовать. Может отсутствовать также понятийный отдел памяти.
В зависимости от вида и уровня развития ОС различные частные сенсорные и эффекторные подсистемы могут быть развиты в большей или меньшей степени или вовсе отсутствовать. Может отсутствовать также понятийный отдел памяти.Функциональная схема обучающейся системы.
В данном разделе приведена функциональная схема обучающейся системы.
Говорить о функциональной схеме обучающейся системы «вообще» весьма затруднительно, поскольку существует огромное число типов естественных ОС, структура нейронных сетей которых очень сильно различается между собой. Схемы ИЛБС различного назначения также непременно будут различаться.
Модель представления знаний АПС допускает построение ИЛБС с различными схемами. Различия в схемах обусловливаются двумя основными причинами.
Во-первых, будут различаться схемы различных инструментальных, исследовательских и прикладных ИЛБС, ориентированных на решение различных задач, поскольку они будут базироваться на компонентах МПЗ АПС, имеющих различное наполнение.
Другим фактором, существенно влияющим на функциональную схему ИЛБС, является степень распараллеливания процессов, протекающих в памяти системы, которую допускают применяемые аппаратные средства. Если это компьютер фон- неймановской структуры, то можно говорить лишь об имитации параллельных процессов. Но надо сразу сказать, что эти компьютеры могут применяться только либо для построения систем, ориентированных на решение задач из очень несложных предметных областей, либо для построения инструментальных систем, на которых будет выполняться отладка алгоритмов функционирования модели.
Системы для работы в средах реальной сложности могут строиться только на базе специальных аппаратных средств, обеспечивающих большую или меньшую степень распараллеливание процессов, протекающих в памяти системы. Для построения ИЛБС могут применяться мультисегментные системы, каждый сегмент которых имитирует один отдел памяти или любой их фрагмент. Каждый сегмент такой системы включает в себя память, осуществляющую только хранение информации, и процессор, осуществляющий последовательную обработку этой информации.
Предельная степень параллелизма достигается при использовании схемы, при которой каждый узел сети представляет собой процессор, выполняющий обработку кванта информации, записанной в этом узле и смежных с ним узлах. В дальнейшем изложении будем рассматривать именно эту схему обучающейся системы.
Приведённая ниже функциональная схема обучающейся системы применима, можно надеяться, к широкому кругу естественных и искусственных обучающихся систем.
Она содержит только основные компоненты, необходимые для реализации основных функций обучающихся систем. Функциональные схемы различных естественных и искусственных обучающихся систем могут быть получены на её основе путём детализации содержащихся в этой схеме компонентов.
Обучающуюся систему можно разделить на два основных компонента – система управления и комплекс органов её жизнеобеспечения. В случае естественной обучающейся системы её системой управления является её нейронная сеть. Комплекс органов жизнеобеспечения ЕОС включает различные конструктивные элементы, такие, как позвоночник, рёбра, и исполнительные механизмы – эффекторы, например, руки, ноги, глаза, уши, органы пищеварения, железы внутренней секреции и т.п. Комплекс средств жизнеобеспечения составляют компоненты системы, внешние по отношению к её системе управления.
Размещенные в органах жизнеобеспечения сенсоры позволяют идентифицировать состояние этих органов. Работой эффекторов непосредственно управляют эффекторные контроллеры. Сенсоры, размещённые в органах жизнеобеспечения, и эффекторные контроллеры будем рассматривать как компоненты системы управления.
В данной работе органы жизнеобеспечения практически не рассматриваются и не упоминаются. Поэтому в дальнейшем, говоря об обучающихся системах, мы будем иметь в виду только их системы управления.
Напомним, что обучающаяся система, органы её жизнеобеспечения и система управления и все их компоненты являются сущностями реального мира. Поэтому в операционной среде обучающейся системы можно выделить сущности двух видов: а) объекты, внешние по отношению к обучающейся системе, в том числе другие обучающиеся системы, а также их системы управления и органы жизнеобеспечения; б) система управления и органы жизнеобеспечения данной обучающейся системы.
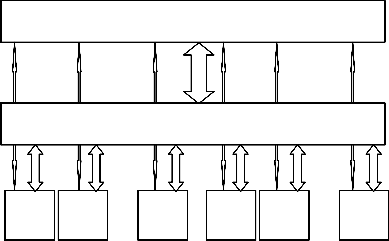
Функциональная схема обучающейся системы представлена на рис. II-1. В общем случае она состоит из следующих основных компонентов: а) сенсорная подсистема; б) эффекторная подсистема; в) мультипериферийный отдел памяти (МПОП); г) понятийный отдел памяти (ПОП).
Эти компоненты образуют иерархию, на нижнем ярусе которой размещаются сенсорные и эффекторные подсистемы. Мультипериферийный и понятийный отделы памяти являются надстройками над сенсорными и эффекторными подсистемами.
В зависимости от вида и уровня развития ОС различные частные сенсорные и эффекторные подсистемы могут быть развиты в большей или меньшей степени или вовсе отсутствовать. Может отсутствовать также понятийный отдел памяти.
Понятийный отдел памяти
Мультипериферийный отдел памяти
Частные сенсорные подсистемы Частные эффекторные подсистемы
Рис. II-1. Функциональная схема обучающейся системы. Обучающаяся система должна иметь развитый интерфейс с операционной средой (средой обитания, предметной областью), включающий в себя средства восприятия и обработки информации из неё, а также средства воздействия на неё. Этим интерфейсом является совокупность сенсорной и эффекторной подсистем, которые соприкасаются с операционной средой.
Сенсорная подсистема осуществляет восприятие внешней нелингвистической и лингвистической информации, преобразование её в представление, принятое в памяти системы, а также обработку этой информации в памяти. Эта информация включает в себя сведения от текущем состоянии органы жизнеобеспечения и эффекторов данной ОС, которые рассматриваются как часть операционной среды ОС.
Сенсорная подсистема в общем случае представляет собой совокупность нескольких частных сенсорных подсистем, каждая из которых осуществляет обработку сенсорной информации определенного вида. Одна сущность реального мира может отображаться в нескольких частных сенсорных подсистемах одновременно, причем в каждой из них будут отображены какое-либо свойство или совокупность свойств данной сущности. В случае млекопитающего примерами сенсорных подсистем могут служить зрительная, акустическая, тактильная, вкусовая, обонятельная, соматосенсорная подсистемы. ИЛБС может иметь технологические сенсорные подсистемы различного назначения.
Общие сведения. Каждая частная сенсорная подсистема включает в себя сенсоры (рецепторы, датчики), осуществляющие восприятие внешних воздействий того или иного вида, сенсорные кодировщики, выполняющие преобразование входных сигналов в форму, принятую в памяти системы, и частный отдел памяти (ЧОП), в котором эта информация запоминается, хранится и обрабатывается.
Сенсоры и кодировщики. Сенсоры осуществляют восприятие входной информации определенного вида. Кодировщики осуществляют преобразование информации, поступающей от сенсоров, к виду, принятому в соответствующем частном сенсорном отделе памяти. Например, если зрительную информацию представлять в виде совокупностей образов контура проекции объекта, цвета и яркости этой проекции, а также координат данной проекции относительно проекций других объектов в зрительном кадре, то зрительная сенсорная подсистема должна иметь кодировщики, осуществляющие формирование указанных выше компонентов зрительных образов.
Информация с выходов кодировщиков сенсорной подсистемы поступает на терминальные (внешние) узлы соответствующего сенсорного частного отдела памяти.
Разделы частной сенсорной подсистемы. Частная сенсорная подсистема, в свою очередь, может состоять из одного или нескольких разделов. Один раздел отличается от другого видом представляемой в нем информации. Например, в зрительной подсистеме можно выделить разделы для представления информации о контурах объектов, их цветах и яркостях, о фактуре поверхностей объектов, о координатах одного объекта относительно другого. Соответствующим образом на разделы разбивается и зрительный сенсорный ЧОП.
Сенсорные подсистемы внешние и внутренние. Сенсорные подсистемы будем подразделять на внешние и внутренние. Внешние сенсорные подсистемы воспринимают информацию из внешней по отношению к обучающейся системы операционной среды. Внутренние сенсорные подсистемы воспринимают информацию от сенсоров, размещенных в исполнительных органах системы и органах её жизнеобеспечения.
Сенсорные подсистемы распределенные и сосредоточенные. Распределенными будем называть сенсорные подсистемы, одним из параметров сенсоров которых является координата сенсора относительно некоторого начала координат или относительно других сенсоров. К числу распределенных сенсорных подсистем ЕОС можно отнести зрительную, тактильную и, возможно, вкусовую.
Сенсорный образ в распределенной сенсорной подсистеме представляет собой совокупность параметров для всех точек сенсорной поверхности. Каждая из этих точек характеризуется в общем случае следующими величинами: - координатами, - совокупностью параметров, характеризующих данную точку сенсорного поля, - величиной сигнала, соответствующего каждому из параметров.
Перечень параметров специфичен для каждой сенсорной подсистемы. В зрительной подсистеме это, вероятно, интенсивности красной, зеленой и синей составляющих данной точки изображения. В тактильной подсистеме – интенсивности механического и температурного воздействия.
В число параметров сенсоров сосредоточенных сенсорных подсистем координаты сенсоров не входят. К числу таковых в ЕОС можно отнести акустическую и, вероятно, обонятельную подсистемы.
Сенсорные подсистемы унарные и бинарные. Некоторые сенсорные подсистемы естественных ОС состоят из двух одинаковых компонентов, ориентированных на обработку информации одного вида. К числу таковых относятся зрительная, акустическая и обонятельная подсистемы. Дублирование таких подсистем преследует следующие цели: - повышение надежности сенсорной подсистемы, - более адекватное восприятие пространственных отношений (это справедливо для зрительной и акустической подсистем).
Подсистемы, не являющиеся бинарными, будем называть унарными.
Эффекторная подсистема обучающейся системы реализует воздействия системы на операционную среду путем выполнения действий. Эти воздействия могут изменять состояние операционной среды и самой системы.
В естественной обучающейся системе используются эффекторы следующих видов: а) двигательные (механические), выполняющие механические действия; б) биохимические, выполняющие биохимические действия; в) оценочные эффекторы, идентифицирующие меру положительной или отрицательной оценки возбуждённого образа; г) управляющие метаэлементы-контроллеры, управляющие процессами функционирования памяти системы.
Эффекторная подсистема, также как и сенсорная подсистема, в общем случае представляет собой совокупность нескольких частных эффекторных подсистем, каждая из которых осуществляет выполнение действий определенного вида.
Для целей дальнейшего изложения необходимо уточнить интуитивно введенное понятие частной эффекторной подсистемы. Что считать таковой? Рассмотрим этот вопрос на примере руки человека. С одной стороны, можно считать, что совокупность всех мышц и соответствующих им кодировщиков и узлов памяти, приводящих в движение ключицу, плечо, предплечье, кисть, фаланги пальцев руки представляют собой одну эффекторную подсистему. С другой стороны, напротив, можно считать, что эффекторной подсистемой является совокупность каждой мышцы, соответствующего ей кодировщика и частного отдела памяти. Поскольку этот вопрос носит условный, договорный характер, условимся считать частной моноэффекторной подсистемой каждый из эффекторов и связанный с ним аппарат управления этим эффектором. Такой подход позволит избежать проблем, связанных с отнесением того или иного эффектора к некоторой эффекторной подсистеме.
Каждая частная эффекторная подсистема, так же как и частная сенсорная подсистема, включает частный отдел памяти, который содержит образы действий, выполняемых данной эффекторной подсистемой. Каждая частная эффекторная подсистема имеет также эффекторные кодировщики. Кодировщики осуществляют перекодировку информации из формы, в которой она хранится в памяти системы, в форму, в которой она используется эффекторами. Эффекторы также являются компонентами эффекторных подсистем.
Двигательные и биохимические эффекторные подсистемы. Будем различать два основных типа эффекторных подсистем: двигательные (механические) и биохимические (печень, почки, железы внутренней секреции и т.п.). Биохимические эффекторные подсистемы с точки зрения построения ИЛБС представляют лишь академический интерес. Поэтому в данной работе они затрагиваться почти не будут.
Информационно-логические биоморфные системы могут иметь технологические эффекторные подсистемы.
Управляемые и автономные эффекторные подсистемы. Эффекторные подсистемы будем подразделять на управляемые и автономные. К числу управляемых будем относить эффекторные подсистемы, которые управляются приобретенными знаниями, размещенными в мультипериферийном и понятийном отделах памяти.
Автономные эффекторные подсистемы приобретенными знаниями не управляются.
Знания, управляющие этими подсистемами, представляют собой априорные (наследственные) знания, которые практически не изменяются в течение всего жизненного цикла системы. Их нарушение приводит, как правило, к нарушению функционирования соответствующего исполнительного органа, т.е. его заболеванию.
Автономными являются все биохимические подсистемы и такие двигательные подсистемы, как подсистемы ориентации глаз, подсистемы регулировки размеров зрачков и управления хрусталиками глаз, подсистемы управления сердцем, перистальтикой и т.п.
Мультипериферийный ОП связывает между собой содержащиеся в сенсорном и эффекторном отделах памяти знания. Он содержит описатели процессов, протекающих в операционной среде, и описатели действий, которые способна выполнять обучающаяся система. Разновидностью этих описателей являются сенсорные и эффекторные описатели лингвистических конструкций разных уровней сложности. Важнейшим компонентом знаний, представленных в МПОП, являются априорные и приобретённые описатели реакций системы на различные внешние воздействия – безусловные рефлексы и априорные стереотипы поведения, формируемые на их основе условные рефлексы и приобретённые стереотипы поведения, а также приобретённые сценарии выполнения различных действий. Таким образом, мультипериферийный ОП представляет собой одну из основных подсистем ОС, реализующих поведенческие функции системы. Этот отдел памяти реализует быструю реакцию системы на внешние воздействия.
Общие сведения. Понятийный ОП опирается на сенсорный, эффекторный и мультипериферийный отделы памяти. Также как и в случае МПОП, основной функцией ПОП является выработка реакции системы на входную информацию.
Отличие заключается в том, что в ПОП для поиска решений используются значительно более развитые средства, чем в МПОП. Выработка этих решений требует, как правило, значительно больше времени.
Структура понятийного отдела памяти. В разделе Уровни представления знаний в понятийном отделе памяти будет показано, что лингвистическую информацию многое роднит с понятийной информацией. Но отождествлять их нельзя. Эти соображения делают целесообразным размещение этих двух видов информации в понятийном отделе памяти, но в разных подотделах, которые условимся называть символьным и понятийным подотделами понятийного отдела памяти (СПОП и ППОП, соответственно). Термин «символьный» применён здесь потому, что перечень символьных сущностей реального мира не исчерпывается лингвистическими СРМ. К их числу относятся также символы, используемые в математике, физике, химии и т.п., а также прочие символьные обозначения и системы, например, дорожные знаки или плакаты техники безопасности. Представление этих символьных СРМ в памяти системы во многом аналогично представлению лингвистической информации.
Обучающиеся системы, имеющие и не имеющие понятийный отдел памяти. Обучающиеся системы – естественные и искусственные – могут иметь или не иметь понятийный отдел памяти. В данном обзоре основное внимание уделено обучающимся системам, имеющим понятийный отдел памяти. Системы, не имеющие ПОП, рассматриваются фрагментально при рассмотрении лишь отдельных вопросов организации и функционирования обучающихся систем.
Физическую среду, в которой хранятся и обрабатываются знания системы, будем называть памятью обучающейся системы. Память системы образует совокупность сенсорного, эффекторного, мультипериферийного и понятийного отделов памяти.
Каждый из указанных выше отделов и частных отделов памяти предназначен для представления определенной формы отображения реального мира. Каждый отдел памяти представляет собой аппарат накопления, обобщения, систематизации, порождения и использования знаний определенного вида. Мультипериферийный и понятийный отделы памяти выполняют, кроме того, функции выработки реакции системы на внешние воздействия.
Каждый отдел памяти может состоять из нескольких подотделов, каждый из которых ориентирован на представление информации определённого вида.
Каждый отдел памяти выполняет замкнутый круг функций и может работать в значительной степени автономно по отношению к другим отделам. Это создает предпосылки для организации их параллельной работы.
Совокупность сенсорных ЧОП будем называть сенсорным отделом памяти, совокупность эффекторных ЧОП – эффекторным отделом памяти, а совокупность сенсорного и эффекторного ОП – периферийным ОП.
В естественных обучающихся системах мультипериферийный и понятийный отделы памяти разделены, вероятно, не конструктивно, а лишь функционально.
Средствами обработки знаний являются метапроцедуры. Большая часть метапроцедур работают во всех отделах памяти. Кроме того, в каждом отделе памяти функционируют метапроцедуры, специфичные для этого ОП.
В зависимости от вида и уровня развития ОС различные отделы памяти могут быть развиты в большей или меньшей степени или вовсе отсутствовать.
Предварительные замечания. Память обучающейся системы содержит ряд управляющих элементов. К их числу относятся диспетчер памяти и множество управляющих априорных элементов, которые будем называть управляющими метаэлементами. Наличие этих элементов позволяет обучающейся системе управлять процессами в памяти системы, что делает эти процессы гибкими и индивидуальными для каждой обучающейся системы.
Управляющие метаэлементы. Управляющие метаэлементы представляют собой компоненты (узлы) памяти системы. Они позволяют инициировать выполнение различных процессов, реализуемых системой метапроцедур АПС, которая является, по существу, системой команд АПС. В результате приобретения системой знаний они включаются в состав приобретённых знаний системы, что позволяет знаниям системы управлять процессами, протекающими в её памяти. Перечень наиболее очевидных управляющих элементов приведён в разделе Метаэлементы управления процессами, притекающими в памяти системы. Необходимо сразу оговориться, что этот перечень, вне всяких сомнений, не полон. Он может быть уточнён только в результате реального моделирования протекающих в памяти системы процессов.
Диспетчер памяти. В процессе функционирования памяти системы возникают альтернативные пути выполнения процессов в памяти системы, из которых система метасредствами или средствами приобретённых знаний выбирает ту или иную альтернативу. Выбор альтернативы имеет своим итогом, как правило, инициацию того или иного процесса в памяти.
Одним их важнейших компонентов памяти является аппарат, который будем называть диспетчером памяти системы. Поскольку память ОС управляет всеми процессами, протекающими в системе, диспетчер памяти ОС можно считать диспетчером системы. К рассмотрению его функций в этой работе мы вернёмся ещё не раз. Здесь же отметим только его основные функции: а) идентификация множеств элементов памяти, которые находятся в некотором смысле в сходных состояниях, и, потому, образуют альтернативные множества; б) управление процессами выборки элементов этих множеств и организации их обработки; в) инициация, прерывание и прекращение процессов мышления и выполнения действий путём передачи управления тем или иным элементам памяти системы.
Процессы мышления и выполнения действий инициируются в различных режимах.
Память ОС, построенной на концепциях АПС, представляет собой многоярусную, иерархическую сеть. Очевидно, что для реализации функции слежения за состоянием элементов памяти и управления их функционированием диспетчер должен быть реализован в виде некоторой распределённой конструкции. Можно полагать, что каждый ОП имеет некоторое множество элементов-диспетчеров. Эти элементы связаны между собой в подсеть, которая представляет собой распределенный диспетчер этого ОП. Есть основания полагать, что диспетчеры разных ОП также связаны между собой для выполнения функций по координации взаимодействия ОП.
Объединение диспетчеров ОП можно рассматривать как распределенный диспетчер памяти обучающейся системы.
Будем различать три уровня представления знаний – периферийный, мультипериферийный и понятийный. Периферийный уровень включает в себя совокупность сенсорных и эффекторных образов, мультипериферийный и понятийный уровни – совокупности мультипериферийных и понятийных образов, соответственно.