Отображение реального мира
в памяти обучающейся системы.
образы сущностей реального мира.
Базисная концепция представления знаний в ОС заключается в следующем. Некоторая ![]() (любая) сущность Ei реального мира в общем случае может быть представлена в виде композиции сущностей Еi,1, Ei,2, ..., Ei,k. Сущность Ei будем называть включающей по отношению к сущностям Еi,j, j = отношению к сущности Ei.
(любая) сущность Ei реального мира в общем случае может быть представлена в виде композиции сущностей Еi,1, Ei,2, ..., Ei,k. Сущность Ei будем называть включающей по отношению к сущностям Еi,j, j = отношению к сущности Ei.
1, ki , а сущности Еi,j, – компонентными по Сущность Ei в свою очередь, может быть компонентной по отношению к некоторой ![]() сущности более высокого уровня композиции. С другой стороны, любая из сущностей Еi,j, j = 1, ki может быть включающей по отношению к сущности более низких уровней композиции.
сущности более высокого уровня композиции. С другой стороны, любая из сущностей Еi,j, j = 1, ki может быть включающей по отношению к сущности более низких уровней композиции.
Сущности реального мира в памяти системы – естественной или искусственной – отображаются элементами знаний и образами, составленными из элементов знаний.
Элемент знаний представляет собой идентификатор некоторой СРМ в памяти системы.
Под знаниями обучающейся системы будем понимать совокупность образов, размещённых в её памяти.
Одна сущность реального мира может отображаться множеством сенсорных (зрительных, акустических, тактильных и других), эффекторных, мультипериферийных и понятийных образов. Если СРМ – динамическая, то она отображаться последовательностью статических образов. Такие последовательности будем называть сценариями.
Элементы знаний и образы, размещённые в памяти обучающейся системы, также являются сущностями реального мира, которые могут отображаться в памяти той же обучающейся системы элементами знаний и образами.
Все образы некоторой СРМ концентрируются в одном образе, который будем называть понятием.
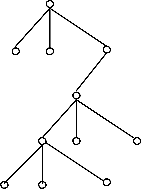
На рис. III-1 представлен фрагмент активной пирамидальной сети, в котором сущность ![]()
![]() реального мира Ei, представлена конструкцией пирамидальной формы. Сущность реального мира Ei в памяти ИЛБС отображается элементом знаний Si, а сущности Еi,j, j = 1, ki – элементами знаний Si,j, j = 1, ki , соответственно. Каждый ЭЗ обозначает в памяти системы (сети) одну СРМ. По аналогии с сущностями соответствующие им элементы знаний Si и Si,j будем называть включающей и компонентными, соответственно.
реального мира Ei, представлена конструкцией пирамидальной формы. Сущность реального мира Ei в памяти ИЛБС отображается элементом знаний Si, а сущности Еi,j, j = 1, ki – элементами знаний Si,j, j = 1, ki , соответственно. Каждый ЭЗ обозначает в памяти системы (сети) одну СРМ. По аналогии с сущностями соответствующие им элементы знаний Si и Si,j будем называть включающей и компонентными, соответственно.
Элементы знаний Si, Si,j образуют пирамидальную конструкцию, которую будем называть образом сущности Ei.
Образ сущности Ei аналитически будем описывать выражением Si (ТL)
Si ,1 ,
Si ,2
, … ,
Si ,ki
, (III-1) где (ТL) – тип (способ) композиции элементов знаний
Si ,1 ,
S i ,2
, … ,
Si ,ki
(см. раздел
Типы композиции элементов знаний в ассоциациях и образах),
- символ, обозначает отношение композиции между ЭЗ
Si , с одной стороны, и
элементами знаний Si ,1 ,
S i ,2
, … ,
Si ,ki
 , с другой.
, с другой.
• • •
Si
Si ,1
Si ,2
Si ,k
• • •
Рис. III-1. Схема представления в памяти ОС сущности реального мира. ![]() Элемент знаний Si будем называть идентификатором образа. Последовательность элементов знаний Si,j, j = 1, ki будем называть компонентной ассоциацией образа.
Элемент знаний Si будем называть идентификатором образа. Последовательность элементов знаний Si,j, j = 1, ki будем называть компонентной ассоциацией образа.
Компонентная ассоциация описывает внутреннюю структуру сущности реального мира Еi. Такое отображение в памяти ОС сущностей реального мира применимо ко всем видам знаний и формам отображения реального мира. Элемент знаний Si будем называть включающим по отношению к ассоциации
Si ,1 ,
S i ,2
, … ,
Si ,ki
. Будем также говорить, что ЭЗ Si опирается на элементы знаний
Si ,1 ,
S i ,2
, … ,
Si ,ki
и ассоциацию S’i =
Si ,1 ,
S i ,2
, … ,
Si ,ki .
Элемент знаний Si может быть компонентным по отношению к некоторому элементу знаний более высокого уровня композиции и входить в его компонентную ассоциацию. С другой стороны, любой из ЭЗ Si,j может быть включающим по отношению к элементам знаний более низких уровней композиции, т.е. быть идентификатором компонентного по отношению к Si образа.
Подчеркнём, что символ « » не означает равенства левой и правой части выражения, описывающего образ. Это символ обозначает отношение между элементом знаний, являющимся, идентификатором образа, и элементами знаний, составляющими компонентную ассоциацию этого образа.
Итак, реальный мир в памяти обучающейся системы отображается в виде ЭЗ и составленных из них образов. Образы, имеющиеся в памяти некоторой обучающейся системы, могут отображаться в памяти той же обучающейся системы также в виде образов.
Узлы в модели представления знаний АПС и, следовательно, в памяти ОС будем подразделять на пассивные и активные. Пассивные узлы никакой информации не несут и могут быть использованы для записи в них новой информации. Активные узлы несут в себе информацию – каждый из них обозначает одну сущность реального мира. Активные узлы мы ранее условились называть элементами знаний. Из активных узлов – элементов знаний строятся образы СРМ.
Пассивные узлы сети, также как и элементы знаний, выполняют некоторый набор метапроцедур. Но, в отличие от ЭЗ, перечень функций пассивных узлов почти исчерпывается процессами перехода узлов из пассивного состояния в активное.
Каждый элемент знаний выполняет две взаимосвязанные функции – функцию среды хранения кванта информации, а также функцию процессора обработки информации, хранящихся в данном ЭЗ и связанных с ним элементах знаний. Эту обработку он осуществляет средствами метапроцедур, которые являются системой команд элементов знаний. Метапроцедуры – это априори встроенные в систему процедуры её функционирования. Большая часть метапроцедур, декларируемых в рамках АПС, выполняется именно элементами знаний.
Существуют ЭЗ различных типов, который определяет тип отношения между компонентными элементами знаний образа, идентификатором которого он является (и между соответствующими им сущностями реального мира).
Элементу знаний приписывается метрика, характеризующая его текущее состояние в каждый момент функционирования памяти системы (см. раздел Величины,
характеризующие текущее состояние элементов знаний и системы в целом).
Каждый элемент знаний имеет входы двух видов – возбуждающие и управляющие, назначение которых очевидно из их названий (см. раздел Связи возбуждающие и
управляющие). В данном обзоре основное внимание уделено возбуждающим входам.
Элементы знаний терминальные и нетерминальные. Элементы знаний, размещенные на нижнем ярусе каждого отдела памяти, будем называть терминальными ЭЗ этого отдела памяти. Эти ЭЗ являются непроизводными в данном отделе памяти. Ярус памяти, составленный из терминальных ЭЗ, будем называть терминальным.
Терминальные ЭЗ будем подразделять на внешние и внутренние. Внешними терминальными ЭЗ являются терминальные ЭЗ сенсорных и эффекторных ЧОП.
Терминальные ярусы мультипериферийного и понятийного ОП и ЭЗ, размещённые на них, будем называть внутренними терминальными ярусами и ЭЗ.
Элементы знаний, не являющиеся терминальными, будем называть нетерминальными.
Каждый нетерминальный ЭЗ является идентификатором какого-либо образа.
Внутренние терминальные ЭЗ также являются идентификаторами образов.
Перечень терминальных ЭЗ конкретного ЧОП определяется спецификой этого ЧОП конкретной ОС. Внешние терминальные узлы априори активны. Они пребывают в таком состоянии в течение всего жизненного цикла системы, за исключением случаев патологии. Эти узлы имеют активные восходящие связи с априорными нетерминальными ЭЗ.
В случае ИЛБС в качестве внешнего терминального яруса памяти может быть выбрана любая совокупность узлов различных ОП. Этот выбор осуществляется разработчиками системы, исходя из назначения и функций системы, а также из конструктивных соображений. Например, терминальный ярус памяти семантической информационно-поисковой системы могут образовывать узлы, представляющие символы естественного языка.
Элементы знаний непроизводные и производные. Непроизводными элементами знаний являются терминальные ЭЗ сенсорных и эффекторных ЧОП. Их компонентные ассоциации пусты. Компонентные ассоциации производных ЭЗ, напротив, не пусты, и включают в себя не менее двух ЭЗ.
Терминальные ЭЗ мультипериферийного и понятийного ОП являются производными.
Непроизводные и производные элементы любого типа могут быть компонентами образа любого типа.
Образы простые и составные. Все образы будем подразделять на простые и составные. Простым будем называть образ, компонентами которого являются исключительно непроизводные ЭЗ. Образ, хотя бы одним компонентом которого является производный ЭЗ, будем называть составным.
Непосредственные и косвенные компонентные элементы образа. Компонентные элементы составного образа будем подразделять на непосредственные и косвенные.
Непосредственными компонентами образа Si будем называть компоненты
Si ,1 ,
Si ,2 ,
… , S
i ,ki
, образа, непосредственно связанные с идентификатором этого образа.
Компоненты образа, связанные с идентификатором образа опосредованно через другие его компоненты, будем называть косвенными. Все компоненты простого образа – непосредственные.
![]()
Множество элементов знаний Si,j, j = знаний или просто ассоциацией.
1, k будем называть ассоциацией элементов Ассоциации будем описывать выражениями вида (TL) или
Si ,1 ,
Si ,2
, … ,
Si ,ki
; (III-2) S’i (TL) =
Si ,1 ,
Si ,2
, … ,
Si ,ki
; (III-3) где ТL – тип ассоциации.
Под мощностью ассоциации будем понимать число Э3, образующих ассоциацию.
Применительно к упорядоченным ассоциациям мощность будем также называть длиной. Если ассоциация S’ имеет мощность (длину) равную n, то это будем обозначать следующим образом: |S’| = n (III-4) В памяти ОС используются преимущественно ассоциации конечной мощности. Вместе с тем для представления так называемых открытых сценариев используются бесконечные ассоциации. Очевидно, что ассоциация может содержать не менее двух компонентов, поскольку в противном случае теряет смысл понятие композиции элементов. Вместе с тем, одиночный элемент в ряде случаев удобно рассматривать как своего рода ассоциацию. Поэтому будем считать, что минимальная мощность ассоциации равна 1. Ассоциацию мощности 1 будем называть вырожденной, а ассоциацию большей мощности – невырожденной.
Рассмотрим ассоциацию S’ произвольного типа S’ = S1, S2, ... , Sm, Sm+1, ... , Sm+k, ... , Sn. (III-5) Выделим из ассоциации S некоторую ассоциацию S’m = Sm, Sm+1, ... , Sm+k. (III-6) Ассоциацию S’m будем называть компонентной ассоциацией или субассоциацией по отношению к ассоциации S’, а ассоциацию S’ – включающей ассоциацией или суперассоциацией по отношению к субассоциации S’m.
Ассоциацию, не содержащую компонентных ассоциаций, будем называть простой. В противном случае будем говорить о составной ассоциации.
Общие сведения. Элементы знаний могут объединяться в ассоциации различными способами. Способ объединения ЭЗ в ассоциации будем называть типом композиции элементов знаний в ассоциации или типом ассоциации. Ассоциации по способу композиции в них элементов знаний будем подразделять на следующие три класса: а) ассоциации, описывающие внутреннюю структуру сущностей реального мира («КР», «КЗ», «И»); б) ассоциации, описывающие внутреннюю структуру классов сущностей реального мира («КРФ», «КЗФ», «ИФ»); в) ассоциации, представляющие собой множества ЭЗ, каждое из которых отображает в памяти ОС множество в некотором смысле сходных СРМ («ИЛИ»).
Ассоциации, описывающие внутреннюю структуру СРМ. Ассоциации, описывающие внутреннюю структуру некоторой СРМ, будем подразделять на упорядоченные (ассоциации-кортежи, или «К»-ассоциации) и неупорядоченные («И»- ассоциации). При неупорядоченной композиции порядок следования элементов знаний в ассоциации не имеет значения. Напротив, при упорядоченной композиции порядок следования ЭЗ в ассоциации существенен.
Ассоциации типа «К» можно также подразделить на разомкнутые («КР»-ассоциации) и замкнутые («КЗ»-ассоциации). Замкнутая К-ассоциация представляет собой кольцевую конструкцию, к элементам которой не применимы понятия первого и последнего элемента.
Ассоциации типа «К» удобны для описания СРМ, внутренняя структура которых представляет собой упорядоченную последовательность компонентов. К числу таких СРМ относятся лингвистические конструкции, различного рода динамических СРМ – процессы, протекающих в операционной среде, выполняемые системой двигательные, биохимические и мыслительные операции, зрительные сценарии, как последовательности зрительных кадров, акустические сигналы как последовательность выборок этих сигналов, линии контуров проекций объектов, как последовательности аппроксимирующих линий контура.
Ассоциации типа «КЗ» применимы для описания циклических, многократно непрерывно выполняемых процессов (например, ходьба, бег), а также тех же линий контуров проекций объектов. Использование таких конструкций в нейронных сетях человека, кажется, не подтверждается данными психологии. Например, обычный человек не может бегло читать текст, расположенный «вверх ногами». Отметим, что в большинстве случаев применение ассоциаций типа «КЗ» не даёт существенных преимуществ по сравнению с применением ассоциаций типа «КР». Кроме того, в ряде случаев оно вызывает дополнительные проблемы. Тем не менее, будем иметь эти ассоциации в виду, поскольку нет полной уверенности в том, что при построении ИЛБС использование конструкций этого вида не окажется целесообразным.
Ассоциации типа «И» применимы для описания внутренней структуры СРМ, которая представляет собой неупорядоченное множество. Примерами таких СРМ могут служить изображения объектов как композиции линии контура объекта, его цвета, яркости, фактуры, положения данного объекта относительно других видимых объектов, а также производные понятия (см. раздел Понятийные производные
образы).
Ассоциации, описывающие внутреннюю структуру классов СРМ. Ассоциации типов «КРФ», «КЗФ» и «ИФ» описывают внутреннюю структуру классов в некотором смысле сходных СРМ. Эти типы ассоциаций будем называть фреймовыми, на что указывает символ «Ф» в их обозначениях.
Ассоциации, описывающие множества СРМ. Ассоциации типа «ИЛИ» также можно подразделить на упорядоченные (ассоциации типа «ИЛИ/У») и неупорядоченные
(ассоциации типа «ИЛИ/Н»). Заметим, что семантика термина «упорядоченная» здесь совершенно иная, чем в случае ассоциаций типа «К» (см. раздел Неупорядоченные и упорядоченные области значений компонентной ассоциации ЭЗ типа «ИЛИ»).
Конструкции представления знаний, декларируемые в рамках АПС, представляют собой унифицированные средства для представления и обработки знаний всех указанных в разделе Виды знаний в обучающихся системах, а также представление знаний всех семантических классов. Перечень типов конструкций почти ограничивается перечнем типов ассоциаций. Имеется лишь одно исключение, о чём будет сказано ниже в данном разделе. Конструкция представления знаний наследует тип её компонентной ассоциации. Тип конструкции воплощается в типе идентификатора этой конструкции. В этом смысле будем говорить о типе элемента знаний.
Для построения образа используется конструкция того или иного типа. Понятие типа применимо к образу и его идентификатору в той же мере, что и к конструкции и его идентификатору.
Ограниченность типов элементов и конструкций представления знаний создаёт возможность оперировать всеми видами знаний как унифицированными синтаксическими конструкциями, что в свою очередь, позволяет использовать ограниченное число метапроцедур. Кроме того, унификация ЭЗ упрощает стыковку между отделами памяти, содержащими различные виды знаний. Все это позволяет упростить средства реализации ОС.
В рамках МПЗ АПС декларируется один вид конструкций, который можно считать дополнительным по отношению к приведённому выше перечню типов ассоциаций. При построении ИЛБС может оказаться полезной конструкция, описывающая непрерывную упорядоченную (т.е. ассоциация типа «К») последовательность одинаковых компонентов. Эти конструкции будем называть «индикатор числа повторений» (ИЧП). Конструкции этого типа подвержены обобщению. Тип конструкции, порождаемой в результате обобщения конструкций типа «ИЧП» будем обозначать как «ИЧПФ».
Таким образом, типы конструкций представления знаний в МПЗ АПС-2010 образуют следующее множество: T = {«КР», «КЗ», «И», «ИЧП», «КРФ», «КЗФ», «ИФ», «ИЧПФ», «ИЛИ/Н», «ИЛИ/У»}.
Образы, представленные конструкциями типов «КР», «КЗ», «И» и «ИЧП», будем называть конкретными; образы, представленные конструкциями «КРФ», «КЗФ», «ИФ» и «ИЧПФ», – обобщёнными, а образы, представленные конструкциями «ИЛИ/Н» и «ИЛИ/У» – образами множеств СРМ.
Одним из достоинств АПС является то, что всё многообразие знаний представляется
только теми конструкциями, перечень которых приведён в разделе Типы композиции элементов знаний в ассоциациях и образах. В процедурном плане образы разных
типов и видов (см. раздел Виды знаний в обучающихся системах) также весьма унифицированы. Использование ассоциации, конструкции и образа того или иного вида определяется избранным способом отображения сущностей реального мира в памяти системы, который, в свою очередь, определяется природой этой сущности и, не в последнюю очередь, конструктивными соображениями – удобством и эффективностью представления образов того или иного вида, т.е. требуемыми при этом затратами аппаратных средств и производительности памяти системы.
Существенными являются также требования к организации эффективного выполнения протекающих в памяти процессов. Из этого следует, что у разработчика ИЛБС имеется некоторая свобода в выборе типа конструкций для представления образов того или иного вида.
Образы, представленные конструкциями типа «К», могут быть представлены также конструкциями типа «И», если каждый компонент последнего имеет ссылку, по крайней мере, на следующий компонент образа типа «К». Это требует дополнительных затрат аппаратных средств, но позволяет значительно снизить требования к частотным характеристикам памяти системы. Конструкция типа «И» может быть также заменена конструкцией типа «К». Эквивалентной заменой конструкции типа «И» является множество конструкций типа «К», компоненты которого описывают все возможные последовательности компонентов образа типа «И». Таким образом, конструкции типов «К» и «И» функционально взаимозаменяемы.
Поскольку каждый частный отдел памяти ОС предназначен для представления знаний определенного вида, в каждом из отделов памяти используется определенный набор типов ассоциаций. В одном частном ОП могут использоваться ассоциации одного или нескольких различных типов.
Отметим, что субассоциация наследует, как правило, тип суперассоциации. Это относится к ассоциациям типов «КР», «КРФ», «И» или «ИФ». Нетрудно видеть, что, если суперассоциация имеет тип «КЗ» или «КЗФ», то субассоциация имеет тип «КР» или «КРФ», соответственно.
![]() Факт вхождения ЭЗ Si,j (j = 1, ki ) в неупорядоченную ассоциацию Si будем обозначать Si,j Si, а в упорядоченную ассоциацию – Si,j ˆ Si.
Факт вхождения ЭЗ Si,j (j = 1, ki ) в неупорядоченную ассоциацию Si будем обозначать Si,j Si, а в упорядоченную ассоциацию – Si,j ˆ Si.
Факт строгого (нестрогого) вхождения субассоциации S’m = Sm, Sm+1, ... , Sm+k в неупорядоченную ассоциацию S’ = S1, S2, ... , Sm, Sm+1, ... , Sm+k, ... , Sn будем обозначать S’m ( ) S или Sm, Sm+1, ... , Sm+k ( ) S, а факт строго (нестрого) вхождения субассоциации S’m в упорядоченную ассоциацию S будем обозначать S’m ˆ ( ˆ ) S, или Sm, Sm+1, ... , Sm+k ˆ ( ˆ ) S.
Операцию пересечения неупорядоченных ассоциаций будем обозначать символом I , а пересечения упорядоченных ассоциаций – символом ˆ .
Операцию вычитания неупорядоченных ассоциаций будем обозначать символом «\».
Непрерывная константная субассоциация. Рассмотрим следующее множество конкретных ассоциаций типа «КР»: S’1(КР) = S 1,1 ,..., S , S ,…, S , S ,…, S ; (III-7)
1, m1 c1
c p 1, m1 p
1, q1
S’2(КР) = S 2 ,1 ,..., S , S ,…, S , S ,…, S ;
2 , m 2 c1
• • •
c p 2 , m 2 p
2 , q 2
S’n(КР) = S n ,1 ,..., S , S ,…, S , S ,…, S .
n , m n c1
c p n , m n p
n , q n
![]()
![]() Пусть Si,u, Si,u+1 Sj,v, Sj,v+1, u = 1, mi
Пусть Si,u, Si,u+1 Sj,v, Sj,v+1, u = 1, mi ![]() v = 1, m j V mi
v = 1, m j V mi ![]() V m j
V m j
p , qi ;
p , q j ;
![]() V – логическое «ИЛИ», i, j = 1, n , i j.
V – логическое «ИЛИ», i, j = 1, n , i j.
Компонентную ассоциацию S’c(КР) = ˆ S’1, S’2, … , S’n =
S c ,…, S c ; (III-8)
| будем называть | непрерывной | константной | компонентной | ассоциацией |
| (субассоциацией) | наибольшей | длины для | включающих | ассоциаций |
![]() (суперассоциаций) S’r; r = 1, n . Поскольку в дальнейшем нас будут интересовать лишь константные субассоциации наибольшей длины, ассоциацию S’c будем называть просто непрерывной константной субассоциацией.
(суперассоциаций) S’r; r = 1, n . Поскольку в дальнейшем нас будут интересовать лишь константные субассоциации наибольшей длины, ассоциацию S’c будем называть просто непрерывной константной субассоциацией.
Компонентные ассоциации S’r,v,1(КР) = Sr,1, Sr,2,…, S и
r , m r
; (III-9) S’r,v,2(КР) = S r , m
p ,…,
![]()
S r , m ; r = 1, n .
будем называть переменными компонентными ассоциациями (субассоциациями) ![]() включающих ассоциаций (суперассоциаций) S’r.
включающих ассоциаций (суперассоциаций) S’r.
Если |S’c| = 1, |S’r,v,k| = 1, r = 1, n , k = 1, 2, то будем говорить о вырожденных константной и переменной субассоциациях или о константном и переменном элементах знаний, соответственно, суперассоциаций S’r.
![]() Множество ассоциаций S’r; r = 1, n , имеющих константную (невырожденную или вырожденную) субассоциацию, будем называть множеством аналогичных ассоциаций (МАА) типа «КР». Множество аналогичных ассоциаций типа «КР» будем обозначать так: {S’1, S’2, … , S’n}.
Множество ассоциаций S’r; r = 1, n , имеющих константную (невырожденную или вырожденную) субассоциацию, будем называть множеством аналогичных ассоциаций (МАА) типа «КР». Множество аналогичных ассоциаций типа «КР» будем обозначать так: {S’1, S’2, … , S’n}.
Схемой множества аналогичных ассоциаций типа «КР» будем называть выражение вида (*, Sc,1, Sc,2, ... , Sc,p, *). (III-10) Будем говорить, что ассоциации, являющиеся компонентами МАА, аналогичны (сходны) между собой в смысле (*, Sc,1, Sc,2, ... , Sc,p, *).
Прерывистая константная субассоциация. Рассмотрим следующее множество конкретных ассоциаций типа «КР»: S’1(КР) = S’1,1 , S’c,1, S’1,2, S’c,2, ... , S’1,g, S’c,g, S’1,g+1; (III-11) S’2(КР) = S’2,1 , S’c,1, S’2,2, S’c,2, ... , S’2,g, S’c,g, S’2,g+1; • • • S’n(КР) = S’n,1 , S’c,1, S’n,2, S’c,2, ... , S’n,g, S’c,g, S’n,g+1.
![]()
![]()
![]() Здесь S’c,k – константные субассоциации ЭЗ; S’i,j, – переменные субассоциации, k = 1, g , i = 1, n , j = 1, g 1 .
Здесь S’c,k – константные субассоциации ЭЗ; S’i,j, – переменные субассоциации, k = 1, g , i = 1, n , j = 1, g 1 .
![]()
![]() Последовательность элементов S’c,1, … , S’c,2, ..., S’c,n будем называть прерывистой константной субассоциацией.
Последовательность элементов S’c,1, … , S’c,2, ..., S’c,n будем называть прерывистой константной субассоциацией.
В образах S’i, i = 1, n ассоциации S’c,k, k = 1, g ![]() совпадают и, следовательно, описывают сходство между СРМ, описанными ассоциациями S’i. Ассоциации S’i,j, j = 1, g 1 описывают, напротив, различия между этими сущностями. Множество {S’i} будем называть множеством аналогичных ассоциаций типа «К».
совпадают и, следовательно, описывают сходство между СРМ, описанными ассоциациями S’i. Ассоциации S’i,j, j = 1, g 1 описывают, напротив, различия между этими сущностями. Множество {S’i} будем называть множеством аналогичных ассоциаций типа «К».
Компонентные константные и переменные субассоциации в каждой из Si могут быть пустыми, вырожденными (одноэлементными) и невырожденными.
Если |S’c,k| = 0, то S’i,k и S’i,k+1 сливаются в одну переменную субассоциацию. Если |S’i,k| = 0, то S’c,k и S’c,k+1 сливаются в одну непрерывную константную субассоциацию.
Вхождение субассоциаций S’c,k в суперассоциации S’i, при котором порядок следования S’c,j, совпадает во всех суперассоциациях S’i, будем называть синхронным. В противном случае будем говорить об асинхронном вхождении константных субассоциаций.
Множество аналогичных ассоциаций типа «КР» и его схему будем обозначать так: {S’1, S’2, … , S’n}; (*, S’c,1, *, S’c,2, ... , *, S’c,g, *). (III-12) Будем говорить, что ассоциации, являющиеся компонентами МАА, аналогичны (сходны) между собой в смысле (*, S’c,1, *, S’c,2, *,..., *, S’c,g, *).
Рассмотрим следующее множество конкретных ассоциаций типа «КЗ»: S’1(КЗ) = S’1,1, S’c,1, S’1,2, S’c,2, ... , S’1,g, S’c,g; (III-13) S’2(КЗ) = S’2,1, S’c,1, S’2,2, S’c,2, ... , S’2,g, S’c,g; • • • S’n(КЗ) = S’n,1, S’c,1, S’n,2, S’c,2, ... , S’n,g, S’c,g.
В ассоциациях типа «КЗ» отсутствует понятие первого и последнего элемента. Поэтому между ЭЗ S’c,g и S’c,1 расположена переменная ассоциация S’i,1. Здесь имеют место следующие соотношения.
Если |S’i,1| = 0, то S’c,g и S’c,1 сливаются в одну непрерывную константную субассоциацию. Если |S’c,g| = 0, то субассоциации S’i,g и S’i,1 сливаются в одну непрерывную константную субассоциацию.
Пусть имеется следующее множество конкретных ассоциаций типа «И»: S’1 (И) = Sc,1 , Sc,2, … , Sc,g, S1,g+1, ... , S’2 (И) = Sc,1 , Sc,2, … , Sc,g, S2,g+1, ... , • • •
S 1, g
S 2, g
p1 ; (III-14)
p2 ;
![]()
![]() S’n(И) = Sc,1 , Sc,2, … , Sc,g, Sn,g+1, ... , S n , g
S’n(И) = Sc,1 , Sc,2, … , Sc,g, Sn,g+1, ... , S n , g ![]()
pn .
Здесь S’c,k, S’i,j, k = элементы знаний.
1, g , i = 1, n , j = g 1, g
pi – терминальные или производные
В ассоциациях S’i, i = ![]() 1, n элементы Sc,k, совпадают и, следовательно, описывают сходство между СРМ, описываемых этими ассоциациями. Субассоциацию S’c = Sc,1 , Sc,2, … , Sc,g, будем называть константной компонентной невырожденной субассоциацией суперассоциаций S’1, S’2,..., S’n.
1, n элементы Sc,k, совпадают и, следовательно, описывают сходство между СРМ, описываемых этими ассоциациями. Субассоциацию S’c = Sc,1 , Sc,2, … , Sc,g, будем называть константной компонентной невырожденной субассоциацией суперассоциаций S’1, S’2,..., S’n.
Компоненты Si,j описывают, напротив, различия между этими сущностями. Субассоциации S’v,i = S’i\S’c, будем называть переменными компонентными субассоциациями суперассоциаций S’1, S’2, ... , S’n.
Очевидно, что в каждой неупорядоченной суперассоциации типа «И» может быть не более одной непустой константной и одной непустой переменной субассоциации.
Множество ассоциаций S’i, имеющих константную (невырожденную или вырожденную) ассоциацию, будем называть множеством аналогичных ассоциаций типа «И». Множество аналогичных ассоциаций типа «И» будем обозначать так: {S’1, S’2, … , S’n}.
Схемой множества аналогичных ассоциаций типа «И» будем называть выражение вида (Sc,1, Sc,2, ... , Sc,g, *) = (*, Sc,1, Sc,2, ... , Sc,g). (III-15) Будем говорить, что ассоциации, являющиеся компонентами МАА, аналогичны (сходны) между собой в смысле (Sc,1, Sc,2, ... , Sc,g, *).
Константные субассоциации могут присутствовать также в одной суперассоциации, например S’ = S’1, S’c, S’2, S’c, ... , S’c, S’n; где S’c - константная субассоциация, а S’1, S’2, ... , S’n – переменные субассоциации.
При этом ассоциация S’ не образует множества аналогичных ассоциаций.
Множество образов, построенных на множестве аналогичных ассоциаций, будем называть множеством аналогичных образов (МАО). Образы, опирающиеся на константные субассоциации, будем называть константными компонентными образами, а образы, опирающиеся на переменные субассоциации – переменными компонентными образами. Вхождение образов нескольких СРМ в одно МАО позволяет относить эти СРМ к одному классу.
Константные компонентные образы идентифицируют аналогию между включающими образами, а переменные компонентные образы, специфичные для каждого из включающих образов, идентифицируют различия между ними. То же можно сказать и о сущностях, обозначаемых включающими и компонентными образами.
Один образ может входить в несколько МАО, что означает наличие многоаспектной аналогии между образами и, следовательно, описываемыми ими сущностями реального мира.
Сущность обобщения заключается в порождении обобщённого образа некоторого класса сущностей реального мира. Это осуществляется путем обобщения образов этих СРМ, т.е. образов, составляющих одно МАО. Результатом этого является обобщённый образ, компонентами которого являются элементы знаний, которые будем называть константными и переменными слотами. Константные слоты опираются на константные компонентные субассоциации образов, составляющих МАО, а переменные – на переменные компонентные ассоциации этих образов.
Одно МАО объединяет образы одного типа. Множество аналогичных образов образуется из образов типов «КР» и «КРФ», «КЗ» и «КЗФ», «И» и «ИФ», «ИЧП» и «ИЧПФ». Множества аналогичных образов, включающие в себя конкретные и обобщённые образы, в данном обзоре не рассматриваются.
Образы типа «ИЛИ/Н» не описывают внутреннюю структуру СРМ. Они описывают множества СРМ. Тем не менее, обобщение образов этих типов, как будет показано в разделе Обобщение образов типа «ИЛИ/Н», целесообразно. Кроме того, элементы знаний типов «ИЛИ/Н» и «ИЛИ/У» могут выступать также в качестве компонентов образов, образующих множество аналогичных образов.
Обобщение эффекторных образов не бессмысленно. Полезно иметь, например, обобщённый образ некоторого класса действий, абстрагированный от интенсивности выполнения компонентов этого действия. Этот обобщённый образ может использоваться для выполнения широкого спектра действий, путем изменения интенсивности выполнения его компонентов. Обобщённые эффекторные образы могут использоваться также для синтеза конкретных эффекторных образов путем конкретизации обобщённых образов.
Множество аналогичных образов может образовываться при образовании конкретного образа любым способом. При образовании одного конкретного образа может возникнуть несколько МАО.
Порождающей способностью обобщённого образа будем называть число конкретных образов, которые могут быть получены на основе данного обобщённого образа при подстановке всех содержащихся в его переменных слотах элементов знаний во всевозможных сочетаниях. Порождающая способность обобщённого образа определяет уровень его общности. Очевидно, чем больше переменных слотов и компонентов в каждом из них имеет обобщённый образ, тем выше его порождающая способность и, следовательно, уровень общности.
Если некоторый обобщённый образ имеет более одного переменного слота, то его порождающая способность может превышать мощность множества аналогичных образов, на котором порожден данный обобщённый образ, что, как правило, имеет место на практике.
Множества аналогичных образов будем подразделять на исходные и порождённые.
Исходным будем называть МАО, на котором строится данный обобщённый образ.
Число конкретных образов, которые могут быть порождены на основе обобщённого образа, может превышать мощность исходного МАО, поскольку в их число могут входить образы, не являвшиеся элементами исходного МАО. Множество аналогичных образов, которые могут быть порождены на базе обобщенного образа, будем называть порождённым.
Схема обобщённого образа. Схемой МАО является схема МАА, на элементах которого построены образы, составляющие этот МАО. На каждом МАО может быть построен обобщённый образ. Схема МАО является также схемой этого обобщённого образа.
Схема конкретного образа. Схемой конкретного образа будем считать его компонентную ассоциацию на уровне его непосредственных компонентов. Следовательно, схемой не декомпозированного образа является его компонентная ассоциация. Декомпозиция меняет схему конкретного образа, поскольку в результате декомпозиции среди его непосредственных компонентов появляются идентификаторы компонентных образов, образованных в результате декомпозиции.
Декомпозиция может быть множественной. Это означает, что один и тот же конкретный образ, будучи элементом нескольких МАО, декомпозируется по-разному. Множественная декомпозиция может иметь место и в рамках одного МАО. Из сказанного следует, что один конкретный образ, описывающий какую-либо сторону одной СРМ, может иметь несколько различных схем. Они отражают многоаспектный характер аналогии данной СРМ с другими сущностями реального мира.
Каждому ЭЗ в компонентной ассоциации образа тем или иным способом приписывается роль, которую он играет в данной ассоциации. Роли могут приписываться элементам знаний одним из следующих способов: а) абсолютной позицией в ассоциации; б) локализаций в том или ином разделе и подразделе памяти системы; в) позицией относительно других Э3 данной ассоциации; г) при помощи другого элемента знаний, обозначающего роль первого.
Задание роли Э3 его абсолютной позицией в ассоциации осуществляется в конструкциях типов «КР» фиксированной длины и структуры. Этот способ задания ролей может использоваться, например, при представлении сенсорной информации, если сенсорный кодировщик формирует образ фиксированной структуры.
Задание роли локализаций в том или ином разделе и подразделе памяти системы может использоваться, например, в сенсорных образах. Зрительный образ проекции объекта можно представить в виде композиции образов его линии контура, цвета, яркости, фактуры и положения относительно прочих проекций объектов в зрительном кадре.
Каждый из этих образов может размещаться в отдельном подотделе зрительного отдела памяти.
Задание роли Э3 его позицией относительно других Э3 данной ассоциации осуществляется в конструкциях типов «КР» и «КЗ». Этот способ задания ролей используется, например, в ассоциациях, отображающих лингвистические конструкции естественного языка. Роль каждой морфемы слова определяются её местоположением относительно других морфем слова. То же можно сказать о ролях слов в языках с обязательным порядком слов.
Задание роли одного ЭЗ при помощи другого может использоваться для задания ролей понятий в декларативных понятийных образах. Роль понятия, обозначаемого корневой морфемой слова, в этих ассоциациях может задаваться понятием-ролью, обозначаемым, например, флексией, предлогом, артиклем. Подчеркнем, что в этом случае понятие-роль является обычным понятием, ничем не отличающимся от содержательного понятия. Приписывание роли одного элемента знаний при помощи другого элемента знаний, обозначающего роль первого, осуществляется в образах типа «И».
Разработчик конкретной ИЛБС, выбирая для представления знаний конструкции того или иного т типа, выбирает тем самым способ задания ролей.
Семантика внешних терминальных ЭЗ. Каждому внешнему терминальному ЭЗ сенсорных и эффекторных частных отделов памяти априори, т.е. на стадии создания системы, приписана определённая семантика. Семантика приписывается путём соединения каждого определённого терминального сенсорного и эффекторного узла с определённым выходом сенсорного или входом эффекторного кодировщика, соответственно. Эти связи совершенно идентичны для всех экземпляров обучающей системы одного вида. Это позволяет системам одного вида воспринимать операционную среду в значительной степени одинаково. Более того, детерминированность этих связей носит наследственный характер в том смысле, что эти связи совершенно идентичны для всех поколений систем одного вида.
Это свойство терминальных узлов обусловлено также следующими обстоятельствами.
В ходе создания обучающейся системы в её память помещаются априорные (наследственные) обобщённые сенсорные образы, которым приписаны оценки. Возбуждение такого образа вызывает возбуждение оценки. Детерминированность связей между терминальными сенсорными узлами и выходами сенсорных кодировщиков необходима для того, чтобы конкретные входные сенсорные образы возбуждали соответствующие им априорные обобщённые образы, вследствие чего будут возбуждаться приписанные им оценки. Зрительный образ конкретного паука вызывает у любого человека ощущения страха и омерзения.
Можно полагать, что такая же детерминированность должна иметь место и в случае внешних терминальных эффекторных ЭЗ. Это обеспечит выполнение в априори определённых ситуациях выполнение априори определённых действий. Так устроены и работают безусловные рефлексы.
Семантика производных ЭЗ. Семантика остальных ЭЗ сети – производных ЭЗ, в том числе внутренних терминальных ЭЗ – может быть априори либо детерминирована, либо не детерминирована.
В памяти системы имеются производные узлы с априори заданной семантикой. Эти узлы размещаются в сенсорном, эффекторном и мультипериферийном ОП. Наличие таких узлов в понятийном отделе памяти нельзя считать доказанным.
Производные ЭЗ с априори детерминированной семантикой входят в состав априорных знаний обучающейся системы – априорных оценочных сценариев, безусловных рефлексов, эмоций и априорных стереотипов поведения. Они имеют априорно заданные связи с априорными непроизводными и производными ЭЗ. Эти узлы используются для построения составных многоярусных сенсорных, эффекторных и мультипериферийных образов.
Детерминированность семантики улов сети обеспечивает фиксированную реакцию систем одного вида на стереотипные внешние воздействия всех обучающихся систем одного вида во множестве их поколений.
Прочие нетерминальные ЭЗ сенсорного и эффекторного отделов памяти, а также терминальные и нетерминальные ЭЗ мультипериферийного и понятийного отделов памяти априорной семантики не имеют. Они её приобретают, когда активируются связи пассивных улов, т.е. когда они становятся элементами знаний. Их семантика определяется, в конечном итоге, непосредственными и опосредованными (через другие ЭЗ) связями с внешними терминальными ЭЗ.
В модели представления знаний АПС-2010 связи выполняют две функции.
Во-первых, они отображают факт связанности элементов знаний. Связи между ЭЗ материализуют связи между включающей и компонентными сущностями реального мира. Связи используются для построения производных элементов из компонентных и поэтому могут рассматриваться, наряду с элементами знаний, как символы языка представления знаний, т.е. как метасимволы по отношению к знаниям, для представления которых они используются. Например, зрительный образ автомобиля характеризуется контуром, цветом и координатами в поле зрительного макрокадра.
Такое разделение зрительного образа на компоненты, а также связывание этих компонентов в единый образ может осуществляться лишь при отображении этого объекта в памяти системы. В реальном мире контур и цвет автомобиля неотделимы один от другого. Связи между элементами знаний активируются системой в процессе отображения реального мира в памяти ОС. Итак, связи в образах всех видов и типов отображают только один, указанный выше, вид отношений. Все остальные отношения между сущностями реального мира также являются сущностями и, поэтому, отображаются в памяти ОС элементами знаний и образами.
Во-вторых, связи в АПС служат для передачи сигналов возбуждения между ЭЗ в ходе функционирования памяти системы. В модели АПС-2010 связям приписывается динамические параметры, которые будем называть проводимостями связей. Наличие этого параметра коренным образом отличает МПЗ АПС-2010 от версии АПС-1990. Под проводимостью связи будем понимать свойство, аналогичное электрической проводимости. Она зависит от интенсивности проходящих по ней сигналов возбуждения и от времени. В каждый момент времени она характеризует текущее состояние конкретной связи. Введение в МПЗ проводимостей связей заметно усложняет модель и приводит к увеличению затрат аппаратных средств. Однако введение этого механизма позволяет более тонко моделировать некоторые эффекты, характерные для нейронных сетей, чего невозможно сделать, используя лишь механизмы, декларированные в рамках МПЗ АПС-1990.
Одной из плоскостей классификации образов в памяти системы является подразделение их на априорные (наследственные) и приобретённые. Связи в априорных образах характеризуются относительной стабильностью. В течение жизненного цикла системы они не разрываются, за исключением случаев патологии. Не меняются, будем полагать, и их проводимости.
Связи между ЭЗ, из которых, по крайней мере, один – приобретенный, образуются и разрываются динамически в процессе функционирования системы. В ходе функционирования системы изменяются и их проводимости.
В активных пирамидальных сетях действуют афферентное и эфферентное возбуждение (см. раздел Возбуждение ЭЗ. Афферентное и эфферентное возбуждение ЭЗ). Поэтому возникает необходимость в создании путей прохождения сигналов возбуждения в обоих направлениях. В текущей версии АПС декларируется использование полнодуплексных связей. Это отличает АПС от нейронных сетей, в которых, по данным нейрофизиологов [Мкртчан С.О., стр. 21], все связи симплексные. Это позволяет сократить примерно в два раза число используемых связей, правда, за счёт некоторого усложнения элементов знаний. Поскольку более 90% объёма головного мозга занимают связи [Захарченко В.М., стр. 4], задача сокращения числа связей чрезвычайно актуальна при построении ИЛБС. Необходимость в одновременной передаче сигналов возбуждения между двумя ЭЗ возникает в некоторых режимах их возбуждения.
Связи нисходящие и восходящие. Все множество возбуждающих связей, инцидентных данному ЭЗ (и узлу), будем подразделять на нисходящие и восходящие.
Нисходящие связи элемента знаний ориентированы в сторону компонентных ЭЗ, а восходящие – в противоположную сторону. Сигналы возбуждения элемента знаний могут поступать и по нисходящим, и по восходящим связям. Для терминальных узлов сенсорных (эффекторных) ЧОП нисходящими связями являются связи с сенсорными (эффекторными) кодировщиками. Подчеркнём, что понятие нисходящей и восходящей связи применимо только к определённому, рассматриваемому в данный момент, ЭЗ. Те же связи по отношению к смежным с ним ЭЗ будут иметь противоположный статус.
Будем различать два вида восходящих связей – одинарные и кустовые. Две или более восходящих связей могут образовывать куст. Каждый куст эквивалентен по своим функциям одинарной связи. Элемент знаний может иметь один, несколько кустов восходящих связей, или вовсе их не иметь. Кустовыми будем называть связи, входящие в кусты.
Связи возбуждающие и управляющие. В АПС каждый узел сети имеет возбуждающие и управляющие. В данном обзоре в явном виде рассматриваются преимущественно возбуждающие связи. Наличие управляющих связей здесь лишь подразумевается при обсуждении вопросов управления процессами, протекающими в памяти системы.
К возбуждающим связям будем относить указанные в предыдущем разделе нисходящие и восходящие связи.
Управляющие связи связывают каждый узел сети с диспетчером памяти. По этим связям диспетчер передаёт выбранному узлу команды управления. Функция команды управления задаётся её кодом, заключённом в этом управляющем сигнале. Одной из наиболее часто используемых команд является команда торможения элемента знаний. Поступление сигнала торможения в элемент знаний по управляющей связи переводит элемент знаний из возбужденного состояния либо в заторможенное, либо в поствозбуждённое состояние.
Входы ЭЗ, к которым подключены возбуждающие (управляющие) связи, будем называть возбуждающими (управляющими).
Связи внутренние и внешние. Связи сети будем подразделить также на связи, соединяющие узлы одного или разных отделов памяти. Будем их называть внутренними и внешними, соответственно. К числу внешних будем также относить связи между терминальными узлами сенсорных и эффекторных ОП, с одной стороны, и кодировщиками сенсорных и эффекторных подсистем, с другой.
Внешние связи мультипериферийного и понятийного отделов памяти выполняют функции, аналогичные функциям нисходящих связей внешних терминальных ЭЗ.
Общие сведения. В последующем тексте будут использоваться термины «кинокадр», «телекадр», «внешний макрокадр», «внутренний макрокадр».
Термины «кинокадр» и «телекадр» пояснений не требуют.
Для целей дальнейшего изложения отметим, что функционирование ОС, в целом, и ввод/вывод информации, в частности, имеет квантованный во времени характер.
Будем полагать, что процесс функционирования ОС разбивается на непрерывную последовательность отрезков времени одинаковой длительности, которые будем называть макротактами. Система на каждом макротакте осуществляет приём и обработку некоторого кванта сенсорной информации, выдачу кванта эффекторной информации, а также обработку квантов информации в мультипериферийном и понятийном отделах памяти.
Кванты информации, которая принимается, выдаётся и обрабатывается системой на одном макротакте, будем называть макрокадрами. Макрокадры будем подразделять на внешние и внутренние, сенсорные и эффекторные. Подробно целесообразность покадровой организации обработки информации и вопросы синхронизации функционирования компонентов ОС рассмотрены в разделе Тактирование и
синхронизация процессов функционирования ОС.
Внешним моносенсорным макрокадром некоторой сенсорной подсистемы будем называть некоторое воздействие операционной среды, оказываемое на сенсоры этой сенсорной подсистемы в течение одного макротакта. Например, под внешним зрительным макрокадром будем понимать статическую зрительную картинку, воспринимаемую зрительной подсистемой в течение одного макротакта, а внешним мультисенсорным макрокадром – воздействие, оказываемое на одном макротакте на сенсоры всех сенсорных подсистем. Другими словами, под внешним мультисенсорным макрокадром будем понимать статический срез ситуации в операционной среде, воспринимаемый сенсорной подсистемой в течение одного макротакта.
Сенсорная информация, снимаемая на каждом макротакте с сенсоров, в сенсорных подсистемах подвергается преобразованию (кодировке) в форму, принятую в сенсорных ЧОП. Квант информации, приём и обработку которого осуществляет каждая частная сенсорная подсистема на каждом макротакте, будем называть внутренним моносенсорным макрокадром. Совокупность внутренних моносенсорных макрокадров, зарегистрированных на одном макротакте, будем называть внутренним мультисенсорным макрокадром.
Итак, внешним моносенсорным макрокадром будем называть совокупность информации, находящейся на сенсорах в течение одного макрокадра, а внутренним макрокадром – совокупность информации, поступающей на вход сенсорного, мультипериферийного или понятийного ОП на каждом макротакте. Примерами внутренних моносенсорных макрокадров могут служить выборки некоторого зрительного процесса, последовательности выборок акустических и подобных им сигналов.
В ходе афферентного возбуждения информация по мере продвижения вверх по ярусам сети претерпевает различного рода преобразования, но сохраняет покадровый характер. Внутренний мультисенсорный макрокадр на входе МПОП отличается от одноимённого макрокадра на входе сенсорного ОП, а на входе в ПОП – от макрокадра на входе в МПОП.
Каждая частная эффекторная подсистема на каждом макрокадре осуществляет обработку кванта информации, который будем называть внутренним моноэффекторным макрокадром. Внутренние макрокадры представляют собой кванты информации, выдаваемые на эффекторы данной эффекторной подсистемы на одном макротакте в кодировке, принятой в данном моноэффекторном ЧОП. Действия, выполняемые эффекторами одной эффекторной подсистемы в течение одного макротакта, будем рассматривать как внешний моноэффекторный макрокадр. Внутренние и внешние моноэффекторные макрокадры также объединяются во внешние и внутренние мультиэффекторные макрокадры. Внутренние мультиэффекторные макрокадры также имеют различия на выходе ПОП, МПОП и эффекторного ОП.
Совокупность мультисенсорного и мультиэффекторного кадров будем называть мультипериферийным макрокадром (внешним или внутренним). Макрокадры реализуются конструкциями типа «И».
Поскольку в последующем изложении фигурируют, в основном, внутренние макрокадры, слово «внутренний» будем опускать в тех случаях, когда это не ведёт к недоразумениям.
Компоновка цельных образов из фрагментов, содержащихся в смежных макрокадрах. Один моносенсорный макрокадр может содержать один или несколько цельных образов СРМ. Но моносенсорный макрокадр содержит, как правило, также фрагменты образов СРМ. Например, зрительная подсистема человека имеет более или менее высокую разрешающую способность только в центральной части сетчатки глаза. На периферии зрительного кадра, как правило, имеются фрагменты других объектов. Этот недостаток зрительной подсистемы человека компенсируется чрезвычайной подвижностью глаз. В результате фрагменты зрительных образы объектов могут попадать в разные зрительные кадры, зарегистрированные на смежных макротактах. Целостные сенсорные образы СРМ компонуются в памяти системы из их фрагментов, содержащихся в последовательности макрокадров. При построении ИЛБС могут использоваться более совершенных зрительные технические средства, чем глаз человека. Но и в этом случае при обработке практически каждого внешнего зрительно кадра будет требоваться компоновка цельного зрительного образа из его фрагментов, попавших в последовательность смежных макрокадров. Сказанное в полной мере относится к восприятию сенсорной информации всех прочих видов.
Конкретным образом будем называть образ, представляющий собой одну из форм отображения в памяти системы какой-либо сущности реального мира. Сущность реального мира отображаются в памяти системы в одной из следующих форм – сенсорной, эффекторной мультипериферийной или понятийной. Одна СРМ может отображаться в памяти множеством образов одной или/и разных форм отображения. Конкретный образ содержит в своей компонентной ассоциации на любом ярусе её представления только конкретные ЭЗ. Конкретные образы представлены в памяти системы конструкциями представления конкретных знаний.
Компонентная ассоциация конструкции типа «КР» (кортеж разомкнутый) представляет собой упорядоченное множество (кортеж, строку) элементов знаний. В компонентной ассоциации может быть выделен первый и последний элементы. Позиция элемента в компонентной ассоциации относительно других элементов в ряде случаев может рассматриваться как его роль.
Образы типа «КР» будем представлять следующим образом: 100 (КР) 0, 1, 1, 2.
Предварительные замечания. Конструкциями этого типа целесообразно представлять сущности, которые могут рассматриваться как упорядоченные последовательности компонентных сущностей. При этом между компонентными сущностями могут существовать семантически различные отношения следования, одной из разновидностей которых является отношение временнОго следования. При отображении таких сущностей в памяти при помощи образов типа «КР» используется лишь один вид отношения – отношения строго порядка.
Эти конструкции, в принципе, могут также использоваться для представления различных антисимметричных отношений, например, причино-следственных, пространственных, плоскостных и т.п. отношений. Но в модели представления знаний АПС-2010 это свойство конструкций типа «КР» не используется.
Применение конструкций типа «КР» в сенсорном ОП. Образами типа «КР» в сенсорных ЧОП могут быть представлены линии контуров объектов, как упорядоченные последовательности аппроксимирующих линий контура, а также акустические образы, как упорядоченные последовательности выборок акустического сигнала.
Применение конструкций типа «КР» в эффекторном ОП. Конструкции типа «КР» могут использоваться в эффекторном ОП для описания элементарных двигательных или биохимических процессов, выполняемых системой в течение одного макротакта, если такие действия могут быть представлены в виде последовательности более мелких действий.
Применение конструкций типа «КР» в МПОП. Естественным применением образов типа «КР» в МПОП является представление сценариев – моносенсорных, мультисенсорных и мультипериферийных. Этими конструкциями удобно представлять все виды сценариев – наблюдаемые и выполнимые, сценарии действий и мышления, акцептированные и синтезированные (см. раздел Виды знаний в
обучающихся системах).
Одним из видов мультипериферийных сценариев, для представления которых используются образы типа «КР», являются лингвистические конструкции, поскольку в силу последовательного характера средств ввода/вывода этой информации, она также может рассматриваться как последовательность событий – последовательность восприятия и выдачи звуков или графических символов.
Применение конструкций типа «КР» в ПОП. Конструкциями типа «КР» в ПОП представляются выполнимые понятийные сценарии действий и мышления.
Конструкции этого типа используются также для представления лингвистической информации в символьном подотделе ПОП.
Конструкция типа «КЗ» (кортеж замкнутый) отличается от конструкции типа «КР» тем, что компонентная ассоциация представляет собой кольцевую (замкнутую) последовательность элементов. В этой последовательности отсутствуют первый и последний элементы, и их нумерация носит условный характер. Для ассоциаций этого типа справедливы следующие соотношения: (КЗ) S1, S2, ... , Sn = (КЗ) S2, ..., Sn, S1 = (КЗ) Sn, S1, ... Sn-1, и т.д.
Таким образом, отношение строго порядка в ассоциации типа «КЗ» определено на любой паре смежных элементов.
Образы типа «КЗ» будем представлять следующим образом: 100 (КЗ) 0, 1, 1, 2.
Отсутствие в компонентной ассоциации конструкции этого типа явно выраженного первого элемента в некоторых режимах работы создаёт некоторые проблемы. Эти проблемы и способы их решения в данном обзоре не рассматриваются.
В результате декомпозиции образа типа «КЗ» образуется образ типа «КР».
Образы типа «КЗ» будем подразделять на моноциклические и мультициклические.
Моноциклические образы описывают СРМ, которые могут быть представлены замкнутыми упорядоченными неповторяющимися последовательностями компонентов. Примером таких образов могут служить линии контуров проекций объектов как последовательности аппроксимирующих линий контура. Для распознавания или вспоминания таких СРМ достаточно одного акта афферентного или эфферентного, соответственно, возбуждения всех компонентов образа.
Мультициклические образы описывают СРМ, повторяющиеся неопределённое число раз подряд. Эти образы – сценарии некоторых действий. Таковыми являются, например, движения ног при ходьбе. Для выполнения таких действий требуется многократное циклическое эфферентное возбуждение компонентных ассоциаций этих образов.
Предварительные замечания. Можно показать, что при применении конструкций типа «КЗ» возникают серьёзные проблемы, вызванные их декомпозицией.
Использование конструкций этого типа в естественных ОС вызывает некоторые сомнения. По этим причинам, в данной работе им не будем уделять серьёзного внимания. Тем не менее, использование этих конструкций при построении ИЛБС может быть оправданным.
Применение образов типа «КЗ» в сенсорном и эффекторном ОП. Поскольку значительная часть линий контура проекций объектов является замкнутыми, может оказаться целесообразным использовать для их представления конструкции типа «КЗ». Вместе с тем, в естественных ОС этот тип конструкций для представления линий контуров проекций объектов едва ли используется. Свидетельством тому может служить то обстоятельство, что для ординарного человека распознавание зрительных образов, в частности текстов, расположенных «вверх ногами», связано со значительными трудностями. Однако применение этого типа образов позволяет значительно сократить затраты памяти на представление зрительных образов контуров одинаковых объектов, проекции которых по-разному ориентированы в плоскости кадра.
Применению конструкций типа «КЗ» для представления эффекторных образов места не видно.
Применение образов типа «КЗ» в мультипериферийном ОП. Конструкции типа «КЗ» могут, в принципе, использоваться также для представления циклических сценариев, например, сценариев, описывающих процессы вращения карусели, ходьбы, бега и т.п. Вместе с тем, использование образов этого типа для представления выполнимых циклических сценариев весьма затруднительно, поскольку в образах типа «КЗ» отсутствует первый элемент. Можно, конечно, условиться о наличии такого элемента в случае применения конструкций этого типа для представления таких сценариев. Впрочем, выполнение циклических сценариев во многих случаях может начинаться с любой его фазы, что снимает вопрос о первом его компоненте.
Прекращение выполнения сценария, построенного на базе конструкции типа «КЗ» может выполняться путем его принудительного торможения, например, при выполнении некоторого условия.
Применение этих конструкций для представления циклических мультипериферийных сценариев требует некоторых отступлений от принципов организации этих конструкций, используемых для представления нециклических образов. Кроме того, можно показать, что циклические сценарии вполне успешно могут строиться и без использования каких-либо дополнительных допущений на основе конструкций типа «КР».
Применение конструкций типа «КЗ» в понятийном ОП. Конструкции типа «КЗ» в ПОП могут использоваться для представления циклических понятийных сценариев, например, сценариев перемножения двух чисел. Но и в этом случае возникают сомнения, высказанные касательно представления при помощи конструкций этого типа мультипериферийных циклических сценариев.
Компонентная ассоциация образа типа «И» представляет собой неупорядоченное множество ЭЗ.
Образы типа «КР» будем представлять следующим образом: 100 (И) 0, 1, 2, 3.
Конструкции типа «И» используются для представления образов, в которых порядок следования составляющих образ компонентов не существенен.
Анализ образов, для представления которых может использоваться конструкция типа «И», приводит к заключению, что образы этого типа двух одинаковых компонентов не содержат.
Предварительные замечания. Одним из применений конструкций этого типа являются образы, описывающие одновременные события.
Понятие одновременности требует уточнения. Одновременность любого множества событий идентифицируется с точностью до дискрета регистрации выборок этого события. Есть события, которые происходят в один и тот же день, час, одну и ту же минуту и т.д. События, произошедшие в течение одного дня, можно представить в
виде последовательности событий по часам, минутам… В рамках АПС-2010 такими дискретами являются макротакты, микротакты и нанотакты (см. раздел Тактирование и синхронизация процессов функционирования ОС). Поэтому при рассмотрении
образов тех или иных видов будем говорить не об одновременности вообще, а о регистрации компонентов образов на одном макротакте, микротакте или нанотакте. Например, компоненты мультипериферийного макрокадра (см. раздел Макрокадры) – мультисенсорный и мультиэффекторный макрокадр регистрируются на одном макротакте. В рамках макротакта эти компоненты образа типа «И» возбуждаются либо одновременно на одном микротакте, либо последовательно на последовательных микротактах в произвольном порядке.
Применение конструкций типа «И» в сенсорном ОП. В сенсорном ОП конструкции типа «И» могут использоваться для представления следующих видов образов.
1. Простые сенсорные образы, компонентами каждого из которых являются идентификатор сенсора и величина сигнала, выдаваемого данным сенсором. Компонентами простых сенсорных образов типа «И» являются терминальные сенсорные ЭЗ.
2. Составные сенсорные образы, например, зрительные образы объектов, каждый из которых можно представить в виде «И»-композиции линии контура, цвета, яркости проекции объекта, возможно, фактуры, и координаты данной проекции объекта в кадре относительно прочих проекций объектов.
3. Моносенсорный макрокадр, который представляет собой «И»-композицию составляющих его проекций объектов.
4. Мультисенсорный макрокадр, который представляет собой «И»-композицию моносенсорных макрокадров.
5. В зрительных образах линии контуров проекций объектов также могут быть представлены конструкциями типа «И». То же можно сказать о представлении любой сенсорной информации.
Применение конструкций типа «И» в эффекторном ОП. В эффекторном ОП образы типа «И» могут использоваться для представления следующих видов образов.
1. Простые эффекторные образы, которые используются для описания композиции идентификатора некоторого эффектора и идентификатора уровня усилия, с которым этот эффектор должен выполнить действие. Компонентами простых эффекторных образов типа «И» являются терминальные эффекторные ЭЗ.
2. Мультиэффекторный макрокадр, который представляет собой «И»-композицию моноэффекторных макрокадров.
Применение конструкции типа «И» в мультипериферийном ОП. В мультипериферийном ОП конструкциями типа «И» представляются мультипериферийные макрокадры, каждый из которых представляет собой «И»- композицию мультисенсорного и мультиэффекторного макрокадров.
Применение конструкций типа «И» в понятийном ОП. В понятийном ОП конструкциями типа «И» представляются декларативные понятийные образы (ДПО).
Компонентами декларативного понятийного образа являются образы, каждый из которых представляет собой «И»-композицию содержательного понятия и понятия- роли.
Рассмотрим следующий образ: 100 (КР) … , 0, 1, 1, 1, 1, 1, 2, …; При взгляде на подобную конструкцию, трудно отделаться от искушения ввести специальный тип элементов представления знаний, который позволял бы компактно описывать последовательности одинаковых элементов знаний. При построении искусственных ОС такой тип образов может оказаться весьма полезным. Его применение может значительно сократить число используемых связей между ЭЗ.
Назовем такой тип ЭЗ индикатором числа повторений (ИЧП) одинаковых ЭЗ. Такой ЭЗ будем представлять следующим образом: S (ИЧП) a, n, где a – идентификатор повторяющегося ЭЗ, n – число повторений компонента «a» в непрерывной последовательности.
Элемент знаний «a» может быть терминальным или производным ЭЗ. Производный ЭЗ является идентификатором какого-либо образа типа «КР» или «И». Нетрудно видеть, что конструкции типа «ИЧП» могут быть компонентами конструкций типов «КР» или «КЗ». Конструкции типа «ИЧП» описывают только разомкнутые упорядоченные последовательности элементов знаний. Если ЭЗ «a» является идентификатором некоторого сценария, то образ 10 является, по существу, описателем некоторого циклического процесса.
При использовании ЭЗ этого типа образ 100 приобретает следующий вид: 100 (КР) … , 0, 10, 2, …; 10 (ИЧП) 1, 5.
В качестве примеров образов, содержащих повторяющиеся компоненты, могут служить следующие образы: - последовательность аппроксимирующих линий контура в образе линии контура проекции объекта в относительных единицах; - акустические образы ударов в барабан; - зрительный образ повторяющегося действия в наблюдаемом сценарии; - образы, описывающие длительности временнЫх интервалов.
Нетрудно видеть, что линии контура квадрата и окружности в относительных единицах могут быть представлены этой конструкцией без применения других конструкций представления знаний.
Конструкции типа «ИЛИ» не являются образами сущностей реального мира. Они представляют собой конструкции, объединяющие образы СРМ, которые могут быть отнесены в некотором смысле к одному классу.
Идентификатор конструкции типа «ИЛИ» может быть отождествлен с любым своим компонентом. Элемент типа «ИЛИ» выполняет только одну функцию – функцию коммутации сигналов возбуждения между его компонентными и включающими ЭЗ.
Поэтому элементам знаний этого типа не приписывается ни уровень возбуждения, ни
приоритет. Они не возбуждаются и не тормозятся (см. раздел Процессы возбуждения и торможения в памяти системы). Идентификаторы конструкций типа «ИЛИ» не включаются в альтернативные множества. В альтернативные множества могут
включаться элементы знаний, компонентные и включающие по отношению к идентификатору образа типа «ИЛИ».
Множество значений компонентов конструкции типа «ИЛИ» может быть неупорядоченным или упорядоченным. В соответствии с этим будем использовать две модификации конструкций типа «ИЛИ», которые будем называть конструкциями типа «ИЛИ/Н» и «ИЛИ/У», соответственно.
Рассмотрим следующее множество W образов Sn: ![]() W = {Sn, n = 1, N }; (III-16) S1 (TL) ..., S2 (TL) ...,
W = {Sn, n = 1, N }; (III-16) S1 (TL) ..., S2 (TL) ...,
•
•
•
SN (TL) ..., S j (rk), ...
S j (rk), ...
S j (rk), ...
Здесь rk – роль элемента S jn .
Для этого множества может быть построена конструкция типа «ИЛИ» вида Sm (ИЛИ)
S j ,
S j , … ,
S j .
Это выражение описывает множество допустимых в образах множества W значений элемента знаний, играющего роль rk.
Обозначим через U rk множество всех значений элемента знаний роли rk, а через U Sn – множество всех значений элементов роли rk в образах S j множества W: U S
U r .
Множество U rk будем называть областью определения элементов знаний роли rk.
Множество
U r может представлять собой неупорядоченное или упорядоченное
множество. Понятие упорядоченности множества U требует некоторых пояснений.
При отнесении множества
U r к классу упорядоченных или неупорядоченных
множеств важен факт объективной, т.е. существующей в реальном мире, а не условной, договорной упорядоченности. По этой причине, например, алфавит естественного языка упорядоченным множеством не является. К числу объективно упорядоченных можно отнести множества натуральных и действительных чисел, значений длин линий контуров и яркостей элементов зрительных образов, значений сигналов, поступающих от тактильных и температурных сенсоров, значений акустических сигналов и т.п.
Если
U r – неупорядоченное множество, то компонентная ассоциация «ИЛИ»-образа
Sm задается перечислением всех допустимых в образах множества W значений элемента роли rk. Компонентная ассоциация образа Sm представляет собой неупорядоченное множество, что будем обозначать следующим образом: Sm (ИЛИ/Н)
S j ,
S j , … ,
S j .
Если U rk - упорядоченное множество, то компонентная ассоциация образа Sm может представлять собой упорядоченное множество, которое задается путем указания его нижней и верхней границ, т.е. путем задания границ интервала значений. В этом случае будем говорить, что образ Sm, его компонентная ассоциация и идентификатор имеют тип «ИЛИ/У».
Sm (ИЛИ/У) Sp,у, Sq,у; где Sp,у = min U Sn ; Sq,у = max U Sn .
Образ типа «ИЛИ/У» порождается на базе образа типа «ИЛИ/Н», при накоплении в последнем достаточно большого числа компонентов. Следует иметь в виду, что создание интервала значений, описываемых образом типа «ИЛИ/У», имеет не достоверный, а правдоподобный характер. Поэтому в том случае, если необходимо иметь не правдоподобный, а достоверный образ, для его представления следует использовать ЭЗ типа «ИЛИ/Н». По мере накопления знаний данный интервал значений может расширяться, а также распадаться на подинтервалы.
Здесь уместно сделать следующее замечание. Можно полагать, что значения сигналов от перечисленных выше сенсоров, образуют континуумы. Мы также полагаем, по крайней мере, в рамках данной версии МПЗ АПС-2010, что терминальные узлы любой сенсорной подсистемы могут хранить лишь дискретные значения. Переход от континуума к дискретной шкале осуществляют кодировщики, размещенные между сенсорами и терминальным ярусом сенсорного ОП. В последующем изложении мы будем говорить о неупорядоченных и упорядоченных областях значений. Под последними будем понимать те области значений, которые, являясь дискретными, образованы из континуальных областей значений.
В каждом отделе памяти реализуются ЭЗ либо типа «ИЛИ/Н», либо «ИЛИ/У», в зависимости от вида информации, отображаемой в данном ОП.
Преставление конкретных образов при их множественной декомпозиции. Конструкции типа «ИЛИ/Н» используются для объединения в единую конструкцию всех образов одной сущности реального мира, образующихся при множественной декомпозиции образов.
Представление терминальных понятий. В понятийном отделе памяти конструкции типа «ИЛИ/Н» используются для представления терминальных понятий, каждое из которых представляет собой «ИЛИ»-композицию всех имеющихся в памяти ОС
образов одной СРМ (см. раздел Тип элемента знаний, используемого в качестве терминального понятия).
Здесь необходимо сделать следующее замечание. Строго говоря, ЭЗ типа «ИЛИ/Н» считать терминальным понятием нельзя. Ему не приписываются ни уровни афферентного и эфферентного возбуждения, ни приоритет. Элементы этого типа не возбуждаются. Поэтому нельзя говорить о распознавании на понятийном уровне сущности реального мира, представленной терминальным понятием. Эти ЭЗ выполняют функции лишь коммутаторов сигналов между инцидентными им элементами знаний. Элемент знаний, выполняющий функции терминального понятия, значительно отличается от прочих ЭЗ. Тем не менее, в дальнейшем мы будем рассматривать эти ЭЗ как идентификатор понятия, не забывая об этих отличиях.
Все нисходящие и восходящие связи ЭЗ, выполняющего функции терминального понятия, в общем случае имеют различные афферентные и эфферентные проводимости. Различия в приоритетах разных образов одной СРМ и в проводимостях связей объясняют, видимо, то, что мы зачастую не можем вспомнить тот или иной образ некоторой СРМ, в то время как остальные её образы вспоминаются легко.
Забегая вперёд, скажем здесь, что ЭЗ типа «ИЛИ/Н», выполняющие функции терминальных понятий, могут служить элементами афферентного и эфферентного отражения при мыслительном горизонтальном возбуждении (см. раздел Элементы
афферентного и эфферентного отражения). Образы этого типа подвергаются
обобщению.
Представление компонентов обобщённых образов. В обобщённых образах конструкции типа «ИЛИ/Н» используются в качестве компонентов этих образов – переменных слотов. Переменные слоты группируют образы, которые в данном обобщённом образе играют одну и ту же роль.
Конструкции типа ИЛИ/У могут использоваться в качестве переменных слотов обобщённых образов для представления следующих величин: а) длительности интервалов времени; б) длин аппроксимирующих линий контуров, а также углов наклона аппроксимирующих линий контуров в зрительных образах; в) значений интенсивности (силы) и скорости выполнения действия эффектором; г) значений параметров управления технологическими объектами.
Элемент знаний типа «ИЛИ/Н», используемый в качестве интегрирующего ЭЗ при множественной декомпозиции, переменного слота обобщённого образа, а также в качестве терминального понятия, существует до тех пор, пока имеет более одного компонента. Если в компонентной ассоциации ЭЗ этого типа остаётся только один компонентный ЭЗ, элемент знаний этого типа элиминируется и его оставшийся компонент присоединяется к идентификатору включающего образа напрямую.
Конструкция Sn (T) …, 200, … 200 (ИЛИ/Н) Sn,i преобразуется в конструкцию Sn (T) …, Sn,i, … В случае ликвидации переменного слота обобщённого образа этот процесс представляет собой, по существу, процесс конкретизации этого обобщённого образа.
используемые при описании элементов знаний и образов. Элементы знаний, размещённые в разных отделах памяти, будем обозначать следующим образом.
{10} – сенсорный ОП; {{10}} – эффекторный ОП; <<10>> – мультипериферийный ОП; [10] – символьный (понятийно-лингвистический) подотдел ПОП; <10> – понятийный подотдел ПОП.
Принадлежность элемента знаний тому или иному отделу памяти может также обозначаться следующим образом: 10/СОП – сенсорный ОП; 10/ЭОП – эффекторный ОП; 10/МПОП – мультипериферийный ОП; 10/СПОП – символьный (понятийно-лингвистический) подотдел ПОП; 10/ППОП – понятийный подотдел ПОП.
По мере изложения материала будут вводиться дополнительные обозначения частных отделов памяти, например, 10/АСОП – акустический сенсорный отдел памяти, 10/ЗСОП – зрительный сенсорный отдел памяти.
Символом « » будем помечать ЭЗ, которые опираются только на сенсорные ЭЗ, а символом « » - только на эффекторные ЭЗ.
Примеры.
100 (КР) [самолет] – лингвистический образ «самолет», эквивалентная следующему образу: 100 (КР) [с], [а], [м], [о], [л], [е], [т].
<самолет> – понятие «самолет» {самолет}/ЗСОП – зрительный образ самолета; {самолет}/АСОП – акустический образ самолета; {{удар кулаком}} – эффекторный образ действия «удар кулаком», выполняемого системой.
В примерах пунктирными линиями разделены различные этапы преобразования образов. Например, при рассмотрении процессов декомпозиции и обобщения над чертой размещены исходные образы, а под чертой – результат декомпозиции или обобщения.
Sп – идентификатор образа, хранящийся в памяти системы на момент поступления на вход системы ассоциации S’вх.
Предварительные замечания. Одним из наиболее существенных отличий МПЗ Активная Пирамидальная Сеть от известных в настоящее время формализмов является то, что процедуры формирования образов классов в некотором смысле сходных статических и динамических сущностей реального мира носят чисто формальный характер и поэтому могут быть реализованы в виде метапроцедур.
Конструкции для представления обобщённых образов, а также метапроцедуры их формирования и модификации представляют собой один из наиболее важных элементов когнитивных средств, необходимых для построения ОС. Они позволяют системе автоматически формировать обобщённые образы на основе накапливаемых в процессе её функционирования конкретных и обобщённых образов.
Для представления образов классов сущностей в МПЗ АПС-2010 используются конструкции, которые будем называть фреймами, общими фреймами, мультифреймами общими мультифреймами.
Сущность процесса обобщения образов. Порождение обобщённого образа некоторого класса сущностей выполняется путем выделения множества устойчивых атрибутов этого класса, идентифицируемых константными элементами множества аналогичных образов, и абстрагирования от несущественных для данного множества сущностей атрибутов, идентифицируемых переменными элементами.
Обобщение и конкретизация образов. Обобщением образов будем называть процесс порождения и модификации обобщённых образов. Процесс построения на базе обобщённого образа образов меньшего уровня общности, в том числе конкретных образов, будем называть конкретизацией образов.
Образы внешние и декомпозиционные. В ходе обобщения образов выполняется также их декомпозиция. Образы будем подразделять на внешние (входные) и декомпозиционные.
Под внешними будем понимать образы, построенные на основе внешней входной информации метапроцедурой композиции образов. Таковыми являются, например, различные сенсорные образы, образы процессов, протекающих в операционной среде, понятийные образы, порождённые путём отображения сенсорной, эффекторной и мультипериферийной нелингвистической и лингвистической информации на понятийный уровень представления знаний.
Декомпозиционными мы будем называть образы, порожденные в результате декомпозиции образов. Декомпозиционными, в частности, являются образы морфем, образовавшиеся в результате декомпозиции образов слов.
В лингвистическом потоке информации внешними образами могут быть дискурсы и предложения. Прочие лингвистические образы – словосочетания, слова, ассоциации морфем, морфемы, буквосочетания – образуются в результате декомпозиции предложений и его компонентов, образованных также в результате декомпозиции. Предложения также могут образовываться в результате декомпозиции дискурса.
Семантика термина «фрейм», приписанная ему в МПЗ АПС-2010, несколько отличается от традиционной, в том числе, от семантики, введенной в [Минский М., 1979]. Здесь мы не станем останавливаться на сходствах и различиях этих определений, которые станут очевидны из дальнейшего изложения. Отметим только, что в АПС-2010 отсутствует разделение фреймов на различные классы, поскольку пирамидальные конструкции в АПС-2010 представляют собой универсальный (безтиповый) аппарат представления знаний любых видов. Отметим также, что помимо приведенных здесь схем фреймов возможны иные схемы фреймов, которые в данном обзоре рассматриваться не будут.
Фреймы будем подразделять на частные и общие. Фрейм, имеющий хотя бы один константный слот, будем называть частным фреймом. Фрейм, компонентами которого являются только переменные слоты, будем называть общим фреймом.
Структура фрейма. Частный фрейм содержит один или несколько константных слотов. Константные слоты идентифицируют устойчивые признаки описываемого им класса сущностей. Они описывают общие для данного класса СРМ черты. Совокупность константных слотов описывает аналогию между сущностями данного класса.
Фреймы описывают также различия между компонентами множества аналогичных образов. Функцию описания различий между элементами МАО выполняют переменные слоты фреймов. Каждый переменный слот описывает множество допустимых значений для компонентов данной роли. Они описывают несущественные для данного класса сущностей атрибуты. Одним из возможных значений переменного слота может быть пустая ассоциация (метаэлемент знаний «пусто») или метаэлемент «любой».
Типы конструкций, используемых для представления фреймов. Фрейм в значительной степени наследует тип конкретных образов, на множестве которых он построен. Вместе с тем, функционирование конкретного образа и соответствующего ему фрейма несколько различаются. Поэтому будем различать тип конкретного образа и тип соответствующего ему фрейма. Типы узлов, используемых в качестве идентификаторов фреймов, будем обозначать следующим образом: «КРФ», «КЗФ», «ИФ» и «ИЧПФ». Они наследуют различия, характерные для конструкций типов «КР», «КЗ», «И» и «ИЧПФ», соответственно.
Основное отличие идентификатора обобщённого образа от идентификатора
соответствующего конкретного образа заключается в следующем. Идентификатор конкретного образа полностью афферентно возбуждается (см. раздел Полное и частичное афферентное возбуждение образов и элементов знаний) при возбуждении
всех его компонентов в порядке, определённым типом образа. В случае идентификатора обобщённого образа будем различать два вида полного афферентного возбуждения – полное афферентное возбуждение по всем слотам и полное афферентное возбуждение по константным слота. Полное афферентное возбуждение первого вида, по существу, эквивалентно возбуждению идентификатора конкретного образа. При этом распознавания конкретной СРМ может и не произойти. Но в этом случае имеет место отнесение некоторой СРМ к определённому классу. Отнесение некоторой СРМ к определённому классу имеет место и при возбуждении идентификатора обобщённого образа только по константным слотам, но с меньшей степенью уверенности. Вообще говоря, она снижается по мере уменьшения числа афферентно возбуждённых слотов фрейма, особенно константных.
При обобщении образов типа «ИЛИ/Н порождается образ того же типа.
Схема фрейма типа «КРФ». Пусть имеется множество S аналогичных образов, построенных на множестве конкретных аналогичных образов типа «КР» (III-11), представленного в разделе Прерывистая константная ассоциация: S1(КР) S’1,1 , S’c,1, S’1,2, S’c,2, ... , S’1,g, S’c,g, S’1,g+1; S2(КР) S’2,1 , S’c,1, S’2,2, S’c,2, ... , S’2,g, S’c,g, S’2,g+1; • • • Sn(КР) S’n,1 , S’c,1, S’n,2, S’c,2, ... , S’n,g, S’c,g, S’n,g+1.
На этом МАО может быть порожден следующий фрейм типа «КРФ»: Sф (КРФ) Sv,1, Sc,1, Sv,2, Sc,2, ... , Sv,g, Sc,g, Sv,g+1; (III-17) где ![]() Sc,k (КР) S’c,k, k = 1, g , если |S’c,k| > 1 (невырожденная ассоциация), Sc,k = S’c,k, если |Sc,k| =1 (вырожденная, т.е. одноэлементная ассоциация), Sv,1 (ИЛИ/Н) S1,1, ... , Sn,1; • • •
Sc,k (КР) S’c,k, k = 1, g , если |S’c,k| > 1 (невырожденная ассоциация), Sc,k = S’c,k, если |Sc,k| =1 (вырожденная, т.е. одноэлементная ассоциация), Sv,1 (ИЛИ/Н) S1,1, ... , Sn,1; • • • ![]()
![]() Sv,g+1 (ИЛИ/Н) S1,g+1, ... , Sn,g+1.
Sv,g+1 (ИЛИ/Н) S1,g+1, ... , Sn,g+1.
Si,j (КР) S’i,j, i = 1, n , j = 1, g 1, если |S’i,j| > 1 (невырожденная ассоциация), Si,j = S’i,j, если |Si,j| = 1 (вырожденная, т.е. одноэлементная ассоциация), Si,j = , если |Si,j| = 0 (пустая ассоциация).
Здесь (КРФ) – тип композиции элементов компонентной ассоциации.
Sc,1, Sc,2, ... , Sc,g – константные слоты фрейма; Sv,1, Sv,2, ... , Sv,g+1 – переменные слоты фрейма.
Если одна из переменных ассоциаций, входящих в данный переменный слот, пуста, то вместо идентификатора этой ассоциации в переменный слот включается символ (пустая ассоциация). Фрейм состоит, по крайней мере, из одного константного слота и, по крайней мере, одного переменного слота. Фрейм типа «КРФ» может иметь множество слотов обоих видов. Обратим внимание на то, что в ходе построения фреймов выполняется также декомпозиция обобщаемых образов.
Пример 1.
100 (КР) 0, 1, 2.
101 (КР) 3, 1, 2.
-------------------------- 300 (КРФ) 200, 10.
10 (КР) 1, 2.
200 (ИЛИ/Н) 0, 3.
Пример 2.
1001 (КР) з, а, е, х, а, т, ь.
1011 (КР) п, р, о, е, х, а, л, и, с, ь.
Образы 1001 и 1011 образуют МАО = {1001, 1011} со схемой (*, 10, *), где 10 (КР) е, х, а, ---------------------------------- 300 (КРФ) 200, 10, 201.
200 (ИЛИ) 11, 13.
201 (ИЛИ) 12, 14.
10 (КР) е, х, а.
11 (КР) з, а.
12 (КР) т, ь.
13 (КР) п, р, о.
14 (КР) л, и, с, ь.
Пример 3.
<<100>> (КР) << 0>>, << 1>>, << 2>>.
<<101>> (КР) << 3>>, << 4>>, << 2>>.
--------------------------------------------------------------- <<300>> (КРФ) << 200>>, << 2>>.
<< 200>> (ИЛИ/Н) << 50>>, << 51>>.
<< 50>> (КР) << 0>>, << 1>>.
<< 51>> (КР) << 3>>, << 4>>.
Пример 4.
<<100>> (КР) << 0>>, << 1>>, << 2>>.
<<101>> (КР) << 3>>, << 4>>, << 2>>.
---------------------------------- <<300>> (КРФ) << 200>>, << 2>>.
<< 200>> (ИЛИ/Н) << 50>>, << 51>>.
<< 50>> (КР) << 0>>, << 1>>.
<< 51>> (КР) << 3>>, << 4>>.
Пример 5.
<<100>> (КР) << 0>>, << 1>>, << 2>>.
<<101>> (КР) << 3>>, << 4>>, << 2>>.
<<102>> (КР) << 5>>, << 6>>, << 2>>.
---------------------------------- <<300>> (КРФ) <<200>>, << 2>>.
<<200>> (ИЛИ/Н) << 50>>, << 51>>, <<52>>.
<< 50>> (КР) << 0>>, << 1>>.
<< 51>> (КР) << 3>>, << 4>>.
<<52>> (КР) << 5>>, << 6>>.
Пример 6.
<<100>> (КР) << 0>>>, << 1>>, << 2>>.
<<101>> (КР) <<3>>, << 1>>, << 2>>.
---------------------------------- <<300>> (КРФ) <<200>>, << 1>>, << 2>>.
или <<300>> (КРФ) <<200>>, <<10>>.
<< 10>> (КР) << 1>>, << 2>>.
<<200>> (ИЛИ/Н) << 0>>, <<3>>.
Схема фрейма типа «КЗФ» аналогична схеме фрейма «КРФ». Различия между ними сводятся, по существу, к различиям, свойственным конкретным образам типов «КЗ» и «КЗ». Образуемые при порождении фрейма типа «КЗ» константные слоты и компоненты переменных слотов приобретают тип «КР».
Схема фрейма типа «ИФ». Пусть имеется множество S аналогичных образов, построенных на множестве конкретных аналогичных образов типа «И»: S1 (И) Sc,1 , Sc,2, … , Sc,g, S1,g+1, ... , S 1, g S2 (И) Sc,1 , Sc,2, … , Sc,g, S2,g+1, ... , S 2, g
•
•
•
Sn(И) Sc,1 , Sc,2, … , Sc,g, Sn,g+1, ... , S n , g
p1 ;
p2 ;
pn .
На этом множестве может быть построен следующий фреймом типа «ИФ»: Sф (ИФ) Sc, Sv; (III-18) Sc (И) Sc,1 , Sc,2, … , Sc,g; Sv (ИЛИ/Н) Sv,1, Sv,2, ... , Sv,n; Sv,1 (И) S1,g+1, ... , S 1, g
•
•
•
Sv,n (И) Sn,g+1, ... , S n , g Здесь
p1 ;
pn .
Sc - константный слот фрейма Sф; Sv - переменный слот фрейма Sф.
Если одна из переменных ассоциаций, входящих в данный переменный класс, пуста, то вместо идентификатора этой ассоциации в переменный слот включается символ (пустая ассоциация).
Отметим, что частный фрейм типа «ИФ» имеет только один константный и один переменный слот.
Пример 1.
100 (И) 0, 1.
101(И) 2, 0.
--------------------------- 300 (ИФ) 0, 200.
200 (ИЛИ/Н) 1, 2.
Пример 2.
100 (И) 0, 1, 2.
101 (И) 0, 3, 4, 1.
----------------------------- 300 (ИФ) 10, 200.
10 (И) 0, 1.
200 (ИЛИ/Н) 2, 11.
11 (И) 3, 4.
На паре образов 100 (ИЧП) 0, 10 и 101 (ИЧП) 0, 20 строится следующий фрейм 300 (ИЧП) 0, 200, 200 (ИЛИ/Н) 10, 20.
Этот фрейм описывает непрерывные последовательности элемента знаний 0 с числом повторений 10 или 20.
В ряде случаев ЭЗ 200 может иметь тип «ИЛИ/У». Тогда фрейм описывает непрерывные последовательности элемента знаний 0 с числом повторений от 10 до 20.
Фреймы для образов типа «ИЛИ» не порождаются, поскольку образы этого типа не описывают сущности реального мира. Тем не менее, обобщение этих образов выполняется. Пусть, например, имеется следующая пара конструкций типа «ИЛИ/Н»: 100 (ИЛИ/Н) 0, 1.
101 (ИЛИ/Н) 0, 2.
Положим, что на этой паре строится следующий фрейм: 300 (ИЛИ/Н-Ф) 0, 200.
200 (ИЛИ/Н) 1, 2.
Нетрудно видеть, что этот фрейм структурно и семантически эквивалентен образу 300 (ИЛИ/Н) 0, 1, 2, который едва ли может рассматриваться как фрейм.
Порождающая способность фрейма типа «КФ». Пусть в памяти ОС имеется следующая пара конкретных образов: [100] (КР) [10], [11], [л]. [101] (КР) [12], [11], [13]. [10] (КР) [за].
[11] (КР) [бежа]. [12] (КР) [при].
[13] (КР) [ли].
На этой паре образов строится фрейм [300] (КРФ) [200], [11], [201].
[200] (ИЛИ/Н) [10], [12]. [201] (КР) [л], [13].
Нетрудно видеть, что порождающая способность фрейма 300, построенного на основе 2-х конкретных образов, равна 4. В частности могут быть построены образы «за-бежа- ли» и «при-бежа-л», которые на вход системы еще не поступали. Напомним, что порождаемые при этом конкретные образы имеют правдоподобный характер и требуют проверки на практике. Более строго этот вопрос освещён в разделе
Обобщение как эквивалентное или правдоподобное преобразование.
Порождающая способность фрейма типа «ИФ». Во фрейме типа «ИФ» имеется лишь один переменный слот. Поэтому его порождающая способность всегда равна числу компонентов переменного слота, т.е. мощности множества аналогичных образов, на котором порождён данный фрейм. Таким образом, фрейм типа «ИФ» семантически полностью эквивалентен множеству аналогичных конкретных образов, на котором он порожден. Другими словами, эти фреймы не содержат в себе другой информации, кроме той, которую содержат конкретные образы из соответствующих им МАО.
Общим фреймом будем называть фрейм, содержащие только переменные слоты.
Каждый компонент общего фрейма описывает множество допустимых для данной роли элементов знаний.
Общий фрейм описывает более обширный круг сущностей реального мира, чем частные фреймы, на которых порождается этот общий фрейм.
Поскольку общий фрейм не имеет константных слотов, нет смысла приписывать идентификатору такого фрейма два уровня афферентного возбуждения. Поэтому будем полагать, что в качестве идентификаторов общих фреймов применяются ЭЗ не фреймовых типов.
Общие фреймы порождаются следующими способами: - путем обобщения частных фреймов относительно их переменных слотов; - путем замены константных слотов фрейма переменными слотами.
Пример.
[300] (КР) [200], [201], [202]. [200] (ИЛИ/Н) [10], [11]. [201] (ИЛИ/Н) [12], [13]. [202] (ИЛИ/Н) [14], [15].
[10] (КР) [про]. [11] (КР) [за]. [12] (КР) [бежа].
[13] (КР) [копа]. [14] (КР) [ть]. [15] (КР) [л].
Целесообразность общих фреймов типа «ИФ» можно проиллюстрировать приведёнными ниже примерами.
Необходимо обратить внимание на то, что общий фрейм типа «И» имеет два переменных слота.
Пример 1.
Рассмотрим зрительные образы 100 – 103, компоненты которых идентифицируют следующие сущности: {0} - контур фигуры «круг»; {1} - контур фигуры «квадрат»; {2} - цвет «белый»; {3} - цвет «черный».
Очевидно, что пары ЭЗ 0 – 1 и 2 – 3 размещаются в различных подразделах памяти.
{100} (И) {0}, {2}.
{101} (И) {0}, {3}.
{102} (И) {1}, {2}.
{103} (И) {1}, {3}.
--------------------------- {300} (ИФ) {0}, {200}; круг белый или черный.
{301} (ИФ) {1}, {200}; квадрат белый или черный.
{302} (ИФ) {201}, {2}; круг или квадрат белый.
{303} (ИФ) {201}, {3}; круг или квадрат черный.
{200} (ИЛИ/Н) {2}, {3}.
{201} (ИЛИ/Н) {0}, {1}.
--------------------------- В результате обобщения фреймов 300 и 301 относительно слота 200 порождается общий фрейм {400} (И) {201}, {200}; круг или квадрат черный или белый.
Эквивалентный результат может быть получен в результате обобщения фреймов 302 и 303 относительно слота 201.
Пример 2.
Пусть имеются следующие понятийные образы: <100> (И) <машина>, <субъект действия>; «машина».
<101> (И) <машина>, <объект действия>; «машину».
<102> (И) <кошка>, <субъект действия>; «кошка».
<103> (И) <кошка>, <объект действия>; «кошку».
------------------------------------------ <300> (ИФ) <машина>, 200.
<301> (ИФ) <кошка>, 200.
<302> (ИФ) <субъект действия>, <201>.
<303> (ИФ) <объект действия>, <201>.
<200> (ИЛИ/Н) <субъект действия>, <объект действия>.
<201> (ИЛИ/Н) <машина>, <кошка>.
------------------------------------------ <304> (И) <201>, <200>.
Порождающая способность общих фреймов типа «КРФ». Общий фрейм типа «КРФ» обладает, как правило, большей порождающей способностью, чем составляющие его частные фреймы. Частные фреймы 300 и 301 300 (КРФ) 0, 200, 2, 201.
301 (КРФ) 6, 200, 7, 201.
200 (ИЛИ/Н) 1, 4.
201 (ИЛИ/Н) 3, 5.
имеют порождающую способность, равную 4, каждый. Порождающая способность общего фрейма 302 (КР) 202, 200, 203, 201; 202 (ИЛИ/Н) 0, 6.
203 (ИЛИ/Н) 2, 7.
равна 16.
Порождающая способность общих фреймов типа «ИФ». Порождающая способность каждого из частных фреймов <300> (ИФ) <машина>, 200, <301> (ИФ) <кошка>, 200, равна 2. Порождающая способность общего фрейма <304> (И) <201>, <200> равна 4, т.е. равна мощности МАО, на котором он порождён.
Мультифреймом будем называть образ, который в качестве, по крайней мере, одного своего компонента имеет идентификатор фрейма или мультифрейма. Каждый из этих фреймов – компонентов мультифрейма – играет в нём роль, аналогичную роли переменного слота фрейма. Идентификатор компонентного фрейма или мультифрейма может быть связан с идентификатором мультифрейма непосредственно или косвенно, являясь компонентом переменного слота мультифрейма. Мультифреймы описывают классы сущностей более высокого уровня общности, нежели фреймы.
Мультифреймы могут порождаться следующими способами: а) заменой в конкретном образе одного или нескольких компонентов идентификаторами фреймов; б) заменой во фрейме константного слота идентификатором фрейма; в) обобщением компонентов переменного слота фрейма; г) обобщением компонентов разных переменных слотов фрейма; д) обобщением двух или более мультифреймов относительно компонента – идентификатора фрейма; е) декомпозицией фреймов и мультифреймов.
Мультифреймы типа «КРФ». 100 (КРФ) 0, 1, 2.
101 (КРФ) 0, 1, 3.
------------------------------------------- 300 (КРФ) 10, 200; {100, 101}.
10 (КРФ) 0, 1.
200 (ИЛИ/Н) 2, 3.
------------------------------------------- 102 (КРФ) 0, 4, 5.
103 (КРФ) 0, 4, 6.
------------------------------------------- 301 (КРФ) 11, 201; {102, 103}.
11 (КРФ) 0, 4.
201 (ИЛИ/Н) 5, 6.
------------------------------------------- 302 (КРФ) 0, 202; {10, 11}.
202 (ИЛИ/Н) 1, 4.
------------------------------------------- 400 (КРФ) 302, 200.
Мультифрейм 400 порождён путём замены во фрейме 300 слота 10 идентификатором фрейма 302. Этот мультифрейм может породить следующие конкретные образы.
100 (КРФ) 0, 1, 2.
101 (КРФ) 0, 1, 3.
104 (КРФ) 0, 4, 2.
105 (КРФ) 0, 4, 3.
-------------------------------------------
| 401 (КРФ) | 302, 201. |
| 102 (КРФ) | 0, 4, 5. |
| 103 (КРФ) | 0, 4, 6. |
| 106 (КРФ) | 0, 1, 5. |
| 107 (КРФ) | 0, 1, 6. |
| ------------------------------------------- | |
| 500 (КРФ) | 302, 203; {400, 401}. |
| 203 (ИЛИ/Н) | 200, 201. |
| 100 (КРФ) | 0, 1, 2. |
| 101 (КРФ) | 0, 1, 3. |
| 102 (КРФ) | 0, 4, 5. |
| 103 (КРФ) | 0, 4, 6. |
| 104 (КРФ) | 0, 4, 2. |
| 105 (КРФ) | 0, 4, 3. |
| 106 (КРФ) | 0, 1, 5. |
| 107 (КРФ) | 0, 1, 6. |
Мультифреймы типа «ИФ». 100 (И) 10, 20, 30.
101 (И) 11, 20, 30.
10 (И) 0, 6.
11 (И) 1, 6.
20 (И) 2, 7.
30 (И) 3, 8.
-------------------------------- 300 (ИФ) 200, 40; {100, 101}.
200 (ИЛИ/Н) 10, 11.
40 (И) 20, 30.
100 (И) 10, 40.
101 (И) 11, 40.
-------------------------------- 301 (ИФ) 201, 6; {10, 11}.
201 (ИЛИ/Н) 0, 1.
-------------------------------- 400 (ИФ) 301, 40.
Мультифрейм 400 имеет два слота: фреймовый (301) и константный (40). Мультифрейм типа «ИФ», в отличие от фрейма этого типа может иметь более двух слотов: один или несколько константных компонентов мультифрейма могут быть заменены переменными или фреймовыми слотами. Нетрудно видеть, что при расширении исходного МАО новыми образами на нём могут быть порождены следующие мультифреймы: 401 (ИФ) 301, 202, 30.
402 (ИФ) 301, 20, 302.
403 (ИФ) 301, 201, 302.
Идентификатор фрейма, как декларировалось выше, может полностью афферентно возбуждаться либо по всем, либо только по константным слотам. Поэтому идентификатор мультифрейма также может полностью афферентно возбуждаться одним из этих двух способов. Это требует использования в качестве идентификатора мультифрейма элемента знаний фреймового типа.
Общие мультифреймы представляют собой обобщённые образы, содержащие только переменные слоты, хотя бы одним компонентом хотя бы одного из которых является фрейм. Общие мультифреймы порождаются путем обобщения мультифреймов относительно переменных слотов.
Пример 1.
400 (КРФ) 300, 200.
401 (КРФ) 301, 200.
-------------------------------- 500 (КРФ) 201, 200.
201 (ИЛИ/Н) 300, 301.
Пример 2.
400 (КРФ) 0, 200.
401 (КРФ) 1, 200.
200 (ИЛИ/Н) 300, 2.
-------------------------------- 500 (КРФ) 201, 200.
201 (ИЛИ/Н) 0, 1.
Принятая в рамках АПС-2010 схема обобщения образов ставит чрезвычайно важный вопрос – вопрос о корректности этих образов Корректность/некорректность обобщённых образов определяет корректность/некорректность образов, порождаемых конкретизацией этих обобщённых образов, т.е. конкретных образов и обобщённых образов меньшего уровня общности. Будем различать корректность обобщённых и порождаемых на их основе образов структурную и семантическую.
Структурно некорректные образы порождаются на основе структурно некорректного обобщённого образа. Структурно некорректным обобщённым образом является образ, схема которого не совпадает со схемой МАО, на котором построен этот обобщённый образ.
Под семантической некорректностью порождённого образа будем понимать противоречивость этого образа образам, накопленным в памяти системы, и которые система рассматривает как достоверные. Семантическая некорректность является следствием двух причин. Во-первых, семантическая некорректность может быть следствием индуктивного характера операции обобщения образов и последующей конкретизации обобщённых образов. Во-вторых, семантическая некорректность порождаемого образа является неизбежным следствием структурной некорректности обобщённого образа, на базе которого порождён данный образ.
Семантическая корректность/некорректность образов, порождаемых конкретизацией обобщённых образов, устанавливается системой либо путём выполнения логических умозаключений на основе имеющихся в памяти системы знаний, либо путём применения полученных таким способом знаний на практике. Поэтому в данном разделе основное внимание уделим на структурной корректности обобщённых образов.
При конкретизации обобщённых образов, имеющих более одного переменного слота, все компоненты одного переменного слота могут сочетаться с любым компонентом любого другого переменного слота. Такой подход носит предположительный, лишь правдоподобный характер. Это делает построение обобщённого образа, имеющего более одного переменного слота, по существу, индуктивным преобразованием образов. Правдоподобный характер процесса обобщения образов означает, что не все образы, синтезируемые на основе данного обобщённого образа, являются семантически корректными.
При конкретизации обобщённых образов, имеющих только один переменный слот, указанный фактор отсутствует. В этом случае можно говорить не об индуктивной, а об эквивалентной (достоверной) замене обобщённым образом множества аналогичных образов. Эквивалентное преобразование при обобщении образов имеет место всегда, когда порождающая способность обобщённого образа не превышает мощности МАО, на котором он был построен.
Эквивалентное преобразование имеет место при порождении и конкретизации фреймов типа «ИФ», а также фреймов типа «К» с одним переменным слотом, а правдоподобное преобразование – при порождении и конкретизации фреймов с множеством переменных слотов, если их порождающая способность превышает мощность МАО, на которых они построены, а также при конкретизации мультифреймов.
Проиллюстрируем семантическую некорректность образов, порождаемых на основе фрейма следующими примерами.
Пример 1.
[100] (КР) [про], [еха], [ли], [сь]. [101] (КР) [за], [еха], [ли].
-------------------------------------------- [100] (КР) [про], [10], [сь]. [101] (КР) [за], [10].
[10] (КР) [еха], [ли].
-------------------------------------------- [300] (КРФ) [200], [10], [201]. [200] (ИЛИ/Н) [про], [за].
[201] (ИЛИ/Н) [сь], .
Здесь на основе фрейма 300 может быть синтезирована некорректная лингвистическая конструкция «заехались».
Пример 2.
Необходим отметить, что в том случае, когда два или более фрейма, порождённых в результате эквивалентных преобразований, используются в процессах логического вывода, то результаты этого вывода, как правило, являются лишь правдоподобными, зачастую неправильными.
<100> (И) <Зюганов>, <есть>, <коммунист>.
<101> (И) <Мельников>, <есть>, <коммунист>.
<102> (И) <Зюганов>, <есть>, <русский>.
<103> (И) <Мельников>, <есть>, <русский>.
------------------------------------------------------------------- <300> (ИФ) <200>, <есть>, <коммунист>.
<200> (ИЛИ/Н) <Зюганов>, <Мельников>.
<301> (ИФ) <200>, <есть>, <русский>.
Фреймы <300> и <301> – достоверные, поскольку их порождающая способность не превышает мощности МАО, на которых они порождены.
------------------------------------------------------------------- <302> (ИФ) <200>, <есть>, <201>.
<200> (ИЛИ/Н) <Зюганов>, <Мельников>.
<201> (ИЛИ/Н) <коммунист>, <русский>.
Фрейм <302> – достоверный, поскольку его порождающая способность не превышает (равна) мощности МАО, на котором он порождён.
------------------------------------------------------------------- Пусть на вход системы поступает ассоциация, которая порождает следующий образ.
<104> (И) <Борщёв>, <есть>, <русский>.
------------------------------------------------------------------- <301> (ИФ) <200>, <есть>, <русский>.
<200> (ИЛИ/Н) <Зюганов>, <Мельников>, <Борщёв>.
Этот фрейм остаётся достоверным.
А фрейм <302> (ИФ) <200>, <есть>, <201>.
переходит в категорию правдоподобных. И это правильно, поскольку Борщёв коммунистом не является.
Такие результаты получаются метасредствами. Люди с развитым логическим мыслительным аппаратом корректируют такие результаты обобщения и конкретизации образов средствами подсознательного и сознательного мышления (понятийно-вербальных рассуждений). У людей с неразвитыми логическим мыслительным аппаратом это свойство метааппарата проявляется в следовании примитивными стереотипам.
Фреймы – частные и общие – структурно всегда корректны. Это является следствием того, что их схема всегда совпадает со схемой МАО, на котором построен данный фрейм.
Проблема. Иначе дело обстоит с мультифреймами. Рассмотрим следующий пример.
100 (КР) 10, 2.
101 (КР) 10, 3.
10 (КР) 0, 1.
102 (КР) 0, 4, 5.
--------------------------------------- Мао,0 = {100, 101}; (10, *).
300 (КРФ) 10, 200.
200 (ИЛИ/Н) 2, 3.
------------------------------------- Мао,1 = {102, 10}; (0, *).
301 (КРФ) 0, 201.
201 (ИЛИ/Н) 1, 13.
13 (КР) 4, 5.
--------------------------------------- В разделе Способы порождения мультифреймов было высказано предположение, что одним из способов порождения мультифреймов является подстановка в каком-либо образе идентификатора фрейма вместо конкретного ЭЗ. Воспользуемся этим способом и подставим идентификатор фрейма 301 во фрейм 300 вместо ЭЗ 10. Это приводит к порождению мультифрейма 400 (КРФ) 301, 200.
0 – (4, 5)/1 – 2/3.
Здесь на основании мультифрейма 400 могут быть порождены образы, не только не входящие в исходное множество конкретных образов, но даже структурно отличные от этих конкретных образов, а именно, 104 (КР) 0, 4, 5, 2.
105 (КР) 0, 4, 5, 3.
----------------------------------- Дадим следующую интерпретацию примеру.
[0] (КР) [по].
[1] (КР) [работа]. [2] (КР) [ть].
[3] (КР) [ли].
[4] (КР) [бежа]. [5] (КР) [л].
----------------------------------- [104] (КР) [0], [4], [5], [2]; (по, бежа, л, ть). [105] (КР) [0], [4], [5], [3]; (по, бежа, л, ли).
Здесь на основе мультифрейма 400 порождаются структурно и семантически некорректные конкретные образы.
----------------------------------- Можно дать иную интерпретацию фигурирующим в этом примере элементам знаний.
[0] (КР) [ловко]. [1] (КР) [хитро].
[2] (КР) [осторожно]. [3] (КР) [нагло].
[4] (КР) [быстро]. [5] (КР) [резко].
----------------------------------- [104] (КР) [0], [4], [5], [2]; (ловко, быстро, резко, осторожно). [105] (КР) [0], [4], [5], [3] ; (ловко, быстро, резко, нагло).
Здесь на основе мультифрейма 400 порождаются структурно некорректные, но семантически вполне корректные конкретные образы. Но это не должно вводить в заблуждение.
Причина возникновения проблемы. Порождение структурно некорректных конкретных образов в случае первой интерпретации является следствием порождения фрейма 301 на образах 102 и 10, которые являются образами разных ролей. При заданной интерпретации образ 102 представляет собой слово, а образ 10 – ассоциацию морфем. К сожалению, этот фактор нельзя использовать в качестве формального основания для запрета построения фрейма 301. В рассматриваемом случае их роли можно идентифицировать через роли понятий, в которые отображаются эти образы и их компоненты. Но как быть в случае буквосочетаний или последовательностей АЛК, которые в понятия не отображаются? В случае второй интерпретации все компоненты образов 100 – 102 являются образами одной роли. При подстановке таких образов любая, даже структурно некорректная, конструкция будет семантически корректной.
Варианты решения проблемы. 1. Можно ограничить порождение обобщённых образов только порождением на базе исходных, не декомпозированных конкретных образов.
100 (КР) 0, 1, 2.
101 (КР) 0, 1, 3.
102 (КР) 0, 4, 5.
--------------------------------------- Мао,0 = {100, 101}; (10, *).
300 (КРФ) 10, 200.
200 (ИЛИ/Н) 2, 3.
10 (КР) 0, 1.
--------------------------------------- Мао,1 = {100, 101,102}; (0, *).
301 (КРФ) 0, 201.
201 (ИЛИ/Н) 11, 12, 13.
11 (КР) 1, 2.
12 (КР) 1, 3.
13 (КР) 4, 5.
--------------------------------------- Мао,2 = {11, 12}; (1, *).
302 (КРФ) 1, 202.
202 (ИЛИ/Н) 2, 3.
--------------------------------------- 401 (КРФ) 0, 203.
203 (ИЛИ/Н) 302, 13.
0 – (1 – 2/3)/(4, 5).
Этот вариант имеет серьёзный недостаток – необходимость иметь исходные, не декомпозированные образы. Это означает, что а) в памяти одновременно должны храниться исходные, не декомпозированные и декомпозированные образы, либо б) при обобщении образов некоторого МАО система должна восстанавливать образы в исходном виде на время выполнения обобщения.
Вариант а) требует почти удвоенных затрат памяти на представление знаний. Кроме
того, в этом варианте значительно усложняются алгоритмы афферентного и эфферентного возбуждения (см. раздел Возбуждение ЭЗ. Афферентное и эфферентное возбуждение ЭЗ).
2. В качестве формального основания для запрета формирования фрейма 301 и, следовательно, мультифрейма 400 можно предложить следующее правило.
Пусть имеется пара образов 10 (КР) 0, 1 и 102 (КР) 0, 4, 5, имеющие общие компоненты. Если один из этих образов, например, 102 является элементом МАО, элементы которого содержат второй образ рассматриваемой пары в качестве своего компонента, то пара образов 10 и 102 множество аналогичных образов не образуют. В рассматриваемом примере образ 102 входит в МАО с образами 100 (КР) 10, 2 и 101 (КР) 10, 3, компонентом которых является образ 10.
Недостатком этого варианта является относительная сложность алгоритма идентификации множеств образов, аналогичных паре образов 10 и 102.
Средства обобщения образов, декларируемые в рамках МПЗ АПС-2010, пригодны для обобщения знаний всех форм отображения реального мира в памяти системы, всех типов образов (конструкций представления знаний), образов всех семантических категорий.
Компонентная ассоциация образа может входить одновременно в различные множества аналогичных ассоциаций. Поэтому один образ может входить в несколько МАО одновременно. Каждое из этих МАО имеет собственную схему. В пределе число таких МАО равно числу элементов компонентной ассоциации образа. Таким образом, рассматриваемая схема представления знаний обеспечивает многоаспектное обобщение содержащейся в памяти информации.
Отметим, что процесс обобщения образов представляет собой по существу процесс их классификации. Многоаспектность обобщения влечёт многоаспектность классификации образов в памяти ОС.
Обобщённые образы в АПС-2010 могут образовывать два вида иерархии.
Во-первых, это иерархия обобщённых образов, соответствующая иерархии конкретных образов. Например, в лингвистической информации можно выделить следующие ярусы: буквы, буквосочетания, морфемы, слова, словосочетания, предложения, дискурс. Каждому из этих ярусов конкретных ЭЗ может соответствовать ярус обобщённых образов. Ярусы обобщённых образов связаны между собой подобно тому, как связаны между собой ярусы конкретных образов. Например, фреймы слов с морфемами в качестве компонентов являются компонентами мультифрейма предложения определённого вида. Этот вид иерархии будем называть ярусной. Таким образом, в памяти наряду с сетью представления конкретных образов образуется сеть обобщённых образов, которая также имеет многоярусную структуру.
Во-вторых, существует иерархия, обусловленная степенью общности обобщённых образов. Конкретный образ может рассматриваться как частный случай обобщённого образа с минимальной порождающей способностью, равной 1. Другим крайним случаем является обобщённый образ без константных слотов, т.е. общий фрейм или общий мультифрейм.
Описание классов СРМ. Распознавание классов СРМ. Одно из важнейших назначений обобщённых образов – описание классов в некотором смысле аналогичных сущностей реального мира. Обобщённый образ представляет собой интенсиональное описания некоторого класса сущностей, что делает их экономичным средством представления информации в памяти ОС.
Обобщённые образы используются для распознавания этих классов СРМ, т.е. для классификации СРМ. Полное афферентное возбуждение обобщённого образа в результате обработки некоторой входной ассоциации представляет собой по существу распознавание класса, к которому может быть отнесена данная СРМ, а частичное возбуждение – идентификацию аналогии наблюдаемой СРМ с некоторым классом сущностей. Сказанное справедливо для всех видов знаний. Это позволяет различать людей, кошек, собак и т.п., процессы падения и процессы подъёма, грамматические классы лингвистических конструкций.
При сопоставлении внешнего образа с информацией, записанной в памяти, внешний образ может быть отнесен в зависимости от плоскости классификации (т.е. совокупности константных субассоциаций) к разным классам образов одновременно, что позволяет осуществить многоаспектное распознавание класса входного образа. Это обстоятельство при обработке одного зрительного образа позволяет не только отличать человека от кота, но и мужчину от женщины, взрослого от ребёнка, европейца от азиата, полноценного человека от инвалида и т.д.
Обобщённые образы высокого уровня общности позволяют проводить грубую классификацию, например, отличать человека от собаки. Обобщённые образы меньшего уровня общности позволяют выполнять более детальную классификацию, например, различать людей по полу, расе, возрасту и т.п.
Контроль корректности входной информации. Если в памяти не нашлось обобщённого образа, который соответствовал бы данному входному образу, то либо система слабо обучена и данный образ представляет совершенно незнакомый данной системе класс сущностей, либо входной образ является ошибочным. Поэтому обобщённые образы используются для контроля корректности входных образов.
Очень важна эта функция обобщённых образов в том случае, когда внешней входной информацией является лингвистическая информация.
Инициация метапроцедуры удивления и процесса внимательного наблюдения за СРМ. Отсутствие в памяти системы конкретного и обобщённого образов, релевантных входной ассоциации – компонента внешнего входного потока информации, означает, что на вход системы поступил образ СРМ, незнакомого системе класса. Этот факт инициирует возбуждения на метауровне крайнего удивления и концентрации на этой СРМ повышенного внимания.
Синтез обобщённых и конкретных образов. Обобщённые образы используются для синтеза новых образов путём их конкретизации. В результате конкретизации обобщённых образов могут порождаться обобщённые образы меньшего уровня общности, а также конкретные образы. При этом могут порождаться образы, не входящие в исходное множество аналогичных образов, на основе которого был построен данный обобщённый образ. Конкретизация обобщённых образов используется при поиске решений. Она является одним из механизмов, реализующих творческие процессы.
Во многих случаях порождение обобщённых образов представляет собой индуктивную процедуру. Результаты конкретизации этих обобщённых образов дают лишь правдоподобный результат, требующий проверки на практике. Вместе с тем, существуют обобщённые конструкции, дающие при их конкретизации достоверный результат.
Приобретение знаний. Процессы обобщения образов и их последующей конкретизации представляют собой одно из метасредств приобретения всех видов знаний, представленных в памяти ОС – сенсорных, эффекторных, мультипериферийных, понятийных.
При построении и модификации обобщённых образов порождаются образы классов СРМ. Кроме того, в процессе обобщения происходит декомпозиция конкретных и обобщённых образов, в результате чего также порождаются новые конкретные и обобщённые образы, выявляются взаимосвязи между исходным образом и декомпозиционными образами, а также между декомпозиционными образами. Это позволяет выявлять метасредствами структуру СРМ, описываемых декомпозируемыми образами.
Конкретизация обобщённых образов позволяет синтезировать новые образы.
Обобщённые образы, порождённые в результате обобщения и конкретизации образов, а также конкретные образы, порождённые в результате конкретизации обобщённых образов, представляют собой один из видов приобретённых (синтезированных) образов, т.е. знаний.
Образные оценочные сценарии. Обобщённые образы являются неотъемлемыми
компонентами образных оценочных сценариев (см. раздел Образные оценочные сценарии), совокупность которых в свою очередь является важнейшим инструментом обеспечения жизнедеятельности ОС, приобретения и верификации знаний.
Представление конкретных образов через обобщённые образы. Обобщённые образы могут в принципе использоваться для представления конкретных образов. Если идентификатор некоторого конкретного образа связать с идентификатором соответствующего ему обобщённого связью специального типа, то к идентификатору конкретного образа по нисходящим связям можно будет подключать только переменные элементы компонентной ассоциации. Состав константных элементов будет описывать соответствующим обобщённым. Такой способ представления конкретных образов позволит уменьшить число связей, используемых для представления конкретных образов. Эта экономия будет иметь место только в том случае, если обобщённый образ будет иметь более одного константного слота.
Проиллюстрируем сказанное следующими примерами.
Пример 1.
100 (КР) 0, 1.
101 (КР) 0, 2.
300 (КРФ) 0, 200.
200 (ИЛИ/Н) 1, 2.
--------------------------- 300 (КРФ) 0, 200.
200 (ИЛИ/Н) 1, 2.
100’ (КР) (300), 1.
101’ (КР) (300), 2.
Здесь экономии связей нет.
Пример 2.
300 (КРФ) 0, 200, 1, 201.
200 (ИЛИ/Н) 2, 3.
201 (ИЛИ/Н) 4, 5.
100 (КР) 0, 2, 1, 4.
101 (КР) 0, 3, 1, 5.
Здесь число связей образов 100 и 101 равно 8.
------------------------------------ 100’ (КР) (300), 2, 4.
101’ (КР) (300), 3, 5.
Здесь число связей образов 100’ и 101’ равно 6. Экономится 2 связи из 8, т.е. 25%.
Вместе с тем при представлении конкретных образов через обобщённые значительно усложняются процедуры афферентного и эфферентного возбуждения, а также процедура перестройки сети при построении и модификации обобщённых образов.
Кроме того, поскольку каждому конкретному образу соответствует, как правило, несколько обобщённых образов, будет возникать вопрос, какой фрейм сделать «опорным» для данного конкретного образа. Поэтому, обозначив здесь возможность такого способа представления конкретных образов, в оставшейся части этой работы будем полагать, что конкретные и обобщённые образы представляются раздельно.
В одной из Частей проекта рассмотрена метапроцедура построения образов по аналогии. Наличие этой метапроцедуры ставит вопрос о целесообразность обобщённых образов и метапроцедуры их порождения и модификации. Нужны ли вообще обобщённые образы? Может быть, метапроцедура аналогии может полностью заменить обобщённые образы? Постановка этого вопроса резонна по той причине, что отказ от построения обобщённых образов позволит достичь существенной экономии затрат памяти. Однако этот вопрос имеет, видимо, отрицательный ответ.
Метапроцедура обобщения заменить обобщённые образы в оценочных сценариях не может принципиально. Одного этого уже достаточно, чтобы считать существование обобщённых образов абсолютно необходимым.
Средствами этой метапроцедуры в принципе можно реализовать поиск аналогий и распознавание классов СРМ. Однако обобщённые образы реализуют эти функции декларативно, а метапроцедура аналогии – процедурно. Здесь важно подчеркнуть, что работа по распознаванию классов СРМ выполняется в ходе обработки каждой входной ассоциации. Использование для этих целей метапроцедуры аналогии при прочих равных условиях значительно снизит скорость реакции системы на входную информацию. По существу при обработке каждой входной ассоциации должна выполняться работа, во многом аналогичная построению фреймов, причем для каждого МАО эта работа будет выполняться многократно. Кроме того, синтез конкретных образов путем конкретизации обобщённых образов менее трудоемок, чем синтез того же образа по аналогии. Такова плата за возможную экономию памяти.
Обобщённые образы позволяют сократить объем этой работы и, следовательно, ускорить реакцию системы.
Прямое назначение метапроцедуры аналогии – порождение образа по аналогии с другим образом (образом-прототипом) в том случае, когда в памяти системы не существует обобщённый образ, релевантный образу-прототипу.
В этом разделе приведен обзор видов знаний, которыми оперирует обучающаяся система. Представление знаний средствами АПС-2010 не требует подразделения знаний на разные классы, поскольку введёнными выше в данной Части конструкциями могут быть представлены знания любых видов всех семантических категорий. Специфика различных видов знаний заключается в некоторых различиях в процедурах их обработки. Приведённая здесь классификация видов знаний позволяет ввести терминологию, которой будем пользоваться при изложении последующего материала.
Общие сведения. Обучающаяся система в начальный момент функционирования имеет в своей памяти некоторую совокупность знаний (образов), которые будем называть априорными или наследственными. Априорные знания необходимы для реализации следующих целей.
Априорные знания обеспечивают функционирование системы на начальных стадиях её жизненного цикла. Наличие априорных периферийных сценариев позволяет системе, даже не имеющей приобретенных знаний, адекватно реагировать на внешние воздействия, что обеспечивает возможность её существования и развития. Значительная часть априорных знаний сохраняет свою актуальность на протяжении всего жизненного цикла системы.
Априорные знания реализуют защитные функции ОС.
Априорные знания используются в процессах принятия решений (планирования деятельности), в том числе выработки реакции в критических ситуациях, например, при угрозе целостности (жизни) обучающейся системы. При поиске решений априорные знания используются для идентификации системой побуждений и локальных целей, а также для оценки найденных решений.
Априорные знания используются также в процессах приобретения знаний. Помимо прочего, априорные знания могут служить прототипами для порождения новых знаний по аналогии с ними. На основе некоторых видов априорных средств
формируются приобретённые средства тех же видов, которые расширяют возможности априорных средств.
При построении ИЛБС перечень периферийных и понятийных знаний, помещаемых в память системы на стадии её разработки, определяется операционной средой (предметной областью) и назначением этой системы.
В отличие от априорных, знания, приобретаемые системой в процессе её функционирования, будем называть приобретенными. Приобретаются образы всех видов.
Очень важным видом приобретенных знаний являются сценарии, описывающие процессы, протекающие в операционной среде без участия или с участием обучающейся системы. Последние описывают поведение и мышление системы в разных ситуациях. Их совокупность представляет собой накопленный опыт функционирования системы.
Процесс приобретения знаний системой протекает в течение всей её жизни.
Превращение приобретенных знаний в априорные. Наиболее важные для жизнедеятельности ОС приобретенные знания, целесообразность которых подтверждается в течение всего жизненного цикла данной системы, могут, видимо, становиться наследственными. Правда, классическая генетика декларирует невозможность такого превращения. Однако, даже если дело обстоит именно так, то при построении ИЛБС можно отказаться от этого принципа, поскольку именно таким способом может быть обеспечена преемственность накопленных системой в течение её жизненного цикла целесообразных знаний последующими поколениями данного вида систем. Вопросы превращения приобретенных знаний в наследственные в данной работе не рассматриваются. Отметим только, что если существует аппарат передачи по наследству периферийных и мультипериферийных знаний, в первую очередь, сценариев, то представляется оправданным допустить, что область его действия распространяется и на понятийные знания.
Обучающаяся система приобретает знания двумя способами – путем извлечения знаний
из входного и выходного потоков информации (см. раздел Входной и выходной потоки информации), а также путем порождения новых знаний на основе уже имеющихся в её памяти знаний. Знания, порождаемые в результате обработки
входного и выходного потока информации, будем называть акцептированными.
Знания, полученные системой из уже имеющихся в памяти системы знаний, будем называть синтезированными (порождёнными). Синтезированные знания порождаются системой в ходе её мыслительной деятельности на основе имеющихся в памяти системы акцептированных и синтезированных знаний. Синтез знаний выполняется различными способами – обобщением имеющихся в памяти системы образов, конкретизацией обобщенных образов, порождением образов по аналогии с имеющимися образами, подражанием, путём конкатенации образов, различного рода их преобразования и т.п.
Порождаемые знания в большинстве случаев имеют правдоподобный характер. Их истинность и целесообразность устанавливается обучающейся системой мыслительным путём или путем их применения на практике. Лишь многократная проверка с получением положительного результата обеспечивает достаточно высокий уровень уверенности в истинности и целесообразности этих знаний.
Обучающаяся система должна иметь средства представления в своей памяти образов статических и динамических сущностей реального мира. Образы процессов, протекающих в предметной области и ОС, а также процедуры поведения самой ОС будем называть сценариями. Все остальные образы будем относить к категории статических. Статические образы будем также называть декларативными, а сценарные образы – процедурными. В этом смысле будем говорить также о статических (декларативных) и сценарных (процедурных) знаниях.
Для представления статических образов используются в большинстве случаев конструкции типа «И». Так, мультипериферийный макрокадр является конструкцией статической, декларативной, поскольку описывает состояние операционной среды и выполняемые системой действия в один статический момент времени. В то же время отдельные моносенсорные и моноэффекторные кадры, входящие в состав этого мультипериферийного макрокадра, могут представлять собой динамические, процедурные образы, если они описывают некоторые процессы, протекающие в операционной среде или выполняемые системой действия за время регистрации этого макрокадра. Примером такого моносенсорного макрокадра может служить акустический макрокадр.
К категории статических знаний будем относить также один из видов понятийных образов – декларативные понятийные образы. Каждый из этих образов описывает взаимосвязь СРМ средствами понятийного уровня представления знаний. Декларативный понятийный образ имеет следующую структуру: «антецедент» - «отношение» - «консеквент». Эти компоненты – суть понятийные образы сущностей реального мира. Отношение описывает вид взаимосвязи антецедента и консеквента. Декларативные понятийные образы могут описывать динамические СРМ, например, «Коля бьёт Петю». Но они либо регистрируют сам факт некоторого события, не описывая последовательности действий, выполняемых некоторым субъектом действий, либо описывают последовательность действий при помощи отношения временного следования типа «затем». Применение к таким образам термина «декларативный» представляется более уместным, нежели термина «статический».
Для представления статических знаний могут использоваться также конструкции типа «К». Примером тому могут служить образы, описывающие в зрительном образе линию контура проекции объекта как последовательность аппроксимирующих линий контура.
Наличие средств представления сценариев позволяет системе накапливать, обобщать, систематизировать и использовать в дальнейшей деятельности знания о внешних по отношению к системе процессах и опыт функционирования самой системы. Отметим, что образ динамической СРМ, например, летящего самолёта, представляет собой последовательность статических образов этого самолёта, каждый из которых описывает самолёт в последовательных фазах полёта.
Для представления всех видов сценариев (см. раздел Виды сценариев) – наблюдаемых, синтезированных и выполнимых, включая лингвистическую информацию, используются в основном конструкции типа «КР». Конструкциями этого типа могут быть представлены некоторые виды моносенсорных макрокадров, например, акустические макрокадры, каждый из которых можно представить как последовательность выборок акустического сигнала. Также конструкциями типа «КР» могут быть представлены некоторые виды эффекторных образов, каждый из которых описывает элементарное действие, выполняемое системой на одном макротакте функционирования системы. Понятийные сценарии описывают на понятийном уровне представления знаний последовательности действий без использования отношений следования.
Во многих случаях для этих же целей могут использоваться также конструкции типа «КЗ».
Сущности реального мира можно подразделить на нелингвистические (чувственные) и лингвистические. В соответствии с этим знания ОС будем подразделять также на нелингвистические и лингвистические. Нелингвистические знания представляют собой сенсорные, эффекторные, мультипериферийные и понятийные образы нелингвистических СРМ. К лингвистическим знаниям будем относить образы лингвистических СРМ.
К лингвистическим сущностям будем относить лингвистические символы, которые будем также называть непроизводными лингвистическими конструкциями, и
производные лингвистические конструкции, составленные из непроизводных и производных лингвистических конструкций.
К непроизводным лингвистическим конструкциям будем относить помимо элементов, которые принято называть буквами, также символы, обозначающие знаки препинания и прочие вспомогательные символы (межсловные пробелы, кавычки, знаки ударения, апострофы и т.п.).
К производным лингвистическим конструкциям будем относить буквосочетания, морфемы, слова, словосочетания, предложения, дискурсы.
Лингвистические СРМ воспринимаются системой при помощи зрительной (графические символы, жесты), акустической (фонемы) и тактильной (шрифт Брайля) подсистем. Лингвистическая информация может быть представлена на одном или нескольких естественных языках.
Разделение образов на нелингвистические и лингвистические на периферийном и мультипериферийном уровнях представления знаний весьма условно. Условность этого разделения заключается в том, что лингвистические сущности представляют собой подмножество сущностей реального мира и представляются в памяти системы такими же периферийными образами, как и образы нелингвистических СРМ. Буква естественного языка описывается его сенсорными зрительными образами, мультипериферийными сценариями, описывающими акустические образы фонемы, соответствующей этой букве, а также выполнимыми сценариями, описывающими произношения этой фонемы и написания графемы.
Многие сущности реального мира в том или ином естественном языке могут не иметь лингвистических эквивалентов. Примером такой СРМ может служить вкус хлеба. Некоторые СРМ в одном естественном языке эквивалентов могут не иметь, а в другом – иметь. Например, у некоторых народов севера имеется почти два десятка лингвистических обозначений разных состояний снега. Большая часть этих обозначений в русском языке отсутствует. Теоретически любые СРМ могут быть вербализованы при помощи специально введённых в оборот для этих целей терминов.
Лингвистические знания представляют собой разновидность более широкого класса знаний – символьных, к числу которых будем также относить символьные системы, используемые в различных специальных дисциплинах – математике, физике, химии, систему дорожных знаков, азбуку Морзе и т.п.
Символьные знания также подразделяются на непроизводные производные.
Производными символьными конструкциями являются в частности, разного рода формулы.
Проблемы, возникающие при обработке символьных систем, а также способы их решения, во многом совпадают с проблемами, возникающими при представлении лингвистических знаний, и способами их решения. В дальнейшем изложении будут рассматриваться методы представления и обработки только лингвистической информации. Но мы будем иметь в виду, что эти методы в значительной степени применимы к символьной информации прочих видов.
Знания (образы) будем подразделять на однородные и комбинированные. Однородные образы содержат только сенсорные или только эффекторные (простые или составные) компоненты. Комбинированный образ имеет как сенсорные, так и эффекторные компоненты. Комбинированные образы могут иметь также комбинированные компоненты. Комбинированные образы в сенсорном и эффекторном отделах памяти не могут существовать по определению. Поэтому комбинированные образы существуют только в мультипериферийном и понятийном ОП.
Система образов в памяти системы имеет многоярусный характер.
Мультипериферийные макрокадры на мультисенсорные и мультиэффекторные макрокадры одновременно. Это даёт основание относить их к категории комбинированных образов. Выполнимые мультипериферийные сценарии (см. раздел
Мультипериферийные выполнимые сценарии действий) также являются комбинированными образами, поскольку их компонентами являются комбинированные образы – мультипериферийные макрокадры. Понятийные сценарии (см. раздел Понятийные сценарии) в числе своих компонентов также имеют эффекторные образы, что также позволяет отнести такие сценарии к разряду комбинированных образов. Терминальные понятия (см. раздел Терминальные понятия) можно отнести к категории комбинированных образов, если среди их компонентов наряду с сенсорными компонентами имеются также эффекторные или/и комбинированные компоненты. Декларативные понятийные образы, которые опираются на такие терминальные понятия, также будем рассматривать как комбинированные.
Простые комбинированные образы не существуют, поскольку они связывают между собой сенсорные и эффекторные образы, размещённые в разных отделах памяти. Комбинированные образы – всегда составные.
Компоненты комбинированных образов будем снабжать признаками, идентифицирующие их вид. Сенсорные компоненты будем снабжать символом « », а эффекторные компоненты – символом « ». Комбинированные элементы специальных признаков не имеют. Эти признаки содержатся и в элементах знаний.
Они необходимы для того, чтобы метапроцедуры возбуждения на каждом шаге функционирования знали, следует ли ожидать афферентного возбуждения очередной связи или выдать в нее сигнал эфферентного возбуждения (см. раздел Возбуждение
ЭЗ. Афферентное и эфферентное возбуждение ЭЗ). В тех случаях, когда вид этих
элементов не принципиален для изложения материала, эти признаки будем опускать.
Сценарии, в том числе и априорные (см. раздел Сценарии априорные и
приобретённые), т.е. помещаемые в память системы на этапе её создания, –
важнейший компонент знаний. Сценарии расширяют функции метапроцедур. Именно они делают мышление и поведение обучающихся систем более гибким и мотивированным, чем мышление и поведение, выполняемое под управлением исключительно метапроцедур. Использование сценариев, в первую очередь приобретённых, вкупе с комплексом всех знаний, накопленных системой, делает мышление и поведение системы индивидуальным, неповторимым.
Узлы и прочие аппаратные компоненты памяти системы реализует набор процедур манипулирования элементами знаний и образами. Это – метапроцедуры. Они не входят в состав комплекса знаний системы, являясь её «системой команд». Сценарии, наряду с другими знаниями, содержащимися в памяти системы, являются объектом манипулирования метапроцедур.
Сценарии, как один из видов знаний (образов), можно подразделить на априорные и приобретённые. В начальный момент функционирования ОС в её памяти содержатся только априорные сценарии (оценочные сценарии, безусловные рефлексы, априорные эмоции и априорные стереотипы поведения). Приобретённые сценарии приобретаются системой в ходе её функционирования.
Наличие априорных понятийных сценариев в естественных ОС достоверного подтверждения пока не имеет. Но при создании ИЛБС включение их в состав априорных знаний системы может оказаться оправданным.
Априорные сценарии будем подразделять на автономные и управляемые.
К числу автономных будем относить такие сценарии, как сценарии управления внутренними органами и секрецией (слюновыделения, выделения желудочного сока и т.п.), рефлексы и априорные оценочные сценарии (см. раздел Априорные оценки). Эти сценарии являются автономными в том смысле, что процессами их инициации и выполнения процессы подсознательного или сознательного мышления управлять не могут.
Остальные априорные сценарии будем относить к числу управляемых. К их числу можно отнести эмоции, априорные стереотипы поведения и все приобретенные сценарии. Инициация, прекращение и интенсивность их выполнения поддаются управлению со стороны диспетчера и процессов сознательного мышления. Например, человек в состоянии сильного голода может есть либо с жадностью, либо сдержано, в зависимости от окружающих обстоятельств и уровня его воспитанности, т.е. обученности. Скорость поглощения пищи регулируется процессами подсознательного или сознательного мышления. Здесь осуществляется подавление стереотипа поведения или управление им.
Сценарии будем подразделять на мультипериферийные и понятийные.
Мультипериферийные сценарии размещаются и работают в мультипериферийном ОП, а понятийные – в понятийном ОП. Эти виды сценариев рассмотрены в разделах
Мультипериферийные сценарии и Понятийные сценарии.
Сценарии наблюдаемые и выполнимые. Динамические сущности, т.е. различного рода процессы, можно подразделить на процессы, в которых принимают участие лишь внешние по отношению к системе субъекты, и процессы, в которых принимает участие также система. В соответствии с этим сценарии будем подразделять на наблюдаемые и выполнимые.
Наблюдаемые мультипериферийные сценарии представляют собой образы процессов, протекающих в операционной среде без участия ОС. Они не содержат ЭЗ, управляющих её исполнительными механизмами. Их компонентами являются только сенсорные образы. Наблюдаемые мультипериферийные сценарии формируются системой путем регистрации входного потока информации.
В понятийный отдел памяти мультипериферийные наблюдаемые мультипериферийные сценарии отображаются в виде наблюдаемых понятийных сценариев, компонентами которых являются терминальные понятия и ДПО, которые опираются на сенсорные и мультипериферийные образы.
Выполнимые сценарии включают в себя, помимо описаний внешних по отношению к ОС процессов, также описания действий (двигательных, биохимических и мыслительных), которые способна выполнять система. Выполнимые сценарии представляют собой образы типа «образ побуждения – образ действия, выполняемого системой», в которых образ действия описывает реакцию системы на образ побуждения. Выполнимые сценарии выполняются обучающейся системой в ходе её функционирования.
Выполнимые сценарии также будем подразделять на мультипериферийные и понятийные.
В начальный момент существования ОС выполнимыми являются лишь априорные сценарии. В ходе функционирования ОС система приобретает навыки выполнения
действий и мышления, которые описываются приобретёнными выполнимыми сценариями. Наблюдаемые и выполнимые мультипериферийные и понятийные сценарии имеют заметные различия.
Сценарии однородные и комбинированные. В разделе Знания однородные и
комбинированные было дано определение однородных и комбинированных образов. Сценарии, как одну из разновидностей образов, также можно подразделять на однородные и комбинированные.
К категории однородных сценариев следует отнести сценарии, которые опираются на компоненты одного вида – сенсорные или эффекторные. Однако, можно привести соображения в пользу того, что однородных эффекторных сценариев не существуют.
Формирование мультипериферийных выполнимых сценариев сопровождается непременно восприятием сенсорных образов. Приём сенсорной информации система осуществляет почти непрерывно в течение всей своей жизни. При выполнении системой каких-либо действий приём сенсорной информации не только неизбежен,
но и необходим. Выполнение системой действий, может вызывать изменения в операционной среде, которые система должна отслеживать. Часть поступающих сенсорных образов описывает результаты действий, выполненных ранее системой в рамках выполнения этого сценария, а также состояние эффекторов, участвующих в его выполнении. Эти сенсорные образы играют роль образов обратной связи. Они выполняют функции оценок целесообразности выполненных действий с точки зрения глобальной цели функционирования ОС. Эти образы позволяют системе контролировать и корректировать ход выполнения действий. Синхронизация выполняемых системой действий и получение сенсорных образов обратной связи осуществляется при помощи мультипериферийных макрокадров. Другая часть поступающих в систему сенсорных образов может описывать события, происходящие в операционной среде, и не связанные с выполняемыми системой действиями.
Сенсорная информация воспринимается системой постоянно в течение всей её жизни за исключением коротких времени, когда система блокирует восприятие всей сенсорной информации, в том числе той, которая играет роль информации обратной связи. Блокировка приёма части сенсорной информации имеет место, в частности при выполнении системой мыслительных операций. Но и в этом случае сенсорная информация, являющаяся информацией обратной связи для выполняемого сценария действий, непременно поступает в память системы. Мыслительные процессы могут блокировать её поступление только в том случае, если волны мыслительного возбуждения захватывают образы, используемые при выполнении действий. В этом случае будет прекращено выполнение либо мыслительного процесса, либо действия.
Если на макротакте, на котором система не выполняет каких-либо действий средствами управляемых эффекторных подсистем, то формируемый на этом макротакте мультипериферийный макрокадр вырождается в мультисенсорный макрокадр. Но выродиться в эффекторный макрокадр мультипериферийный макрокадр не может, поскольку выполнение действий всегда сопровождается восприятием сенсорной информации. Эффекторные образы не могут быть самостоятельными компонентами сценариев даже в том случае, если они являются компонентами первых макрокадров мультипериферийных сценариев действий. Такие макрокадры, как правило, не содержат конкретных сенсорных компонентов, поскольку они не могут быть образами обратной связи. Множество экземпляров сенсорных компонентов начальных макрокадров спустя некоторое время забываются и заменяются метаэлементом « » (любой). Таким образом, сенсорный компонент в мультипериферийном макрокадре присутствует всегда.
Сказанное выше позволяет считать, что выполнимых моноэффекторных и мультиэффекторных сценариев не существует.
Мультипериферийные выполнимые сценарии в качестве своих компонентов имеют, помимо сенсорных образов, также эффекторные и/или комбинированные образы.
Компонентом понятийных выполнимых сценариев действий и мыслительных сценариев являются терминальные понятия, декларативные понятийные образы, мультипериферийные сценарии, в том числе выполнимые, и управляющие
метаэлементы-контроллеры. Терминальные понятия и ДПО могут опираться на мультипериферийные выполнимые сценарии. Поэтому и понятийные выполнимые сценарии также можно отнести к числу комбинированных.
Итак, все выполнимые сценарии являются комбинированными сценариями.
Однородными сценариями могут быть только сценарии, которые опираются исключительно на сенсорные образы или понятия, не опирающиеся на выполнимые мультипериферийные сценарии, т.е. наблюдаемые сценарии. Из сказанного следует, что граница, разделяющая наблюдаемые и выполнимые сценарии, практически совпадает с границей между однородными и комбинированными сценариями.
Сценарии – наблюдаемые и выполнимые – могут быть акцептированными или порождёнными (синтезированными).
Акцептированные сценарии порождаются в памяти системы в результате регистрации входного и выходного потоков информации, т.е. регистрации получаемых системой сенсорных образов и выполняемых системой действий. Акцептированные наблюдаемые сценарии порождаются в результате регистрации сенсорных образов процессов, протекающих в операционной среде без участия самой системы.
Акцептированные выполнимые сценарии порождаются в результате регистрации образов процессов, в которых принимает участие система. И те, и другие порождаются путём выделения их из открытых сценариев.
Синтезированные сценарии являются результатом мысленной деятельности системы, в том числе, поиска наиболее оптимальной реакции системы на внешнее воздействие или внутреннее побуждение. На основе акцептированных наблюдаемых и выполнимых сценариев различными способами могут порождаться сценарии, которые будем называть синтезированными. В зависимости от сценария-прототипа и применяемой метапроцедуры порождения нового сценария будем различать наблюдаемые и выполнимые синтезированные сценарии. На основе наблюдаемого сценария метапроцедурой аналогии порождается наблюдаемый сценарий, а метапроцедурой подражания – выполнимый сценарий. Эта метапроцедура образы наблюдаемых действий заменяет образами действий самой системы. На основе выполнимого сценария метапроцедурой аналогии может быть порождён также выполнимый сценарий. На основе выполнимого сценария метапроцедурой подражания может быть порождён наблюдаемый сценарий. При этом выполняется обратная замена образов действий – образы действий системы заменяются образами действий другой системы.
Очевидно, что использование акцептированных и синтезированных сценариев имеет некоторую специфику. Синтезированные сценарии являются лишь правдоподобными знаниями. Они отличаются от акцептированных выполнимых сценариев тем, что они еще не прошли испытания на практике. При применении синтезированных выполнимых сценариев система должна «помнить» о том, что эти сценарии описывают процессы, которые не происходили реально в операционной среде. После хотя бы однократного выполнения они переходят в разряд реально выполнимых.
Приобретение системой акцептированных и синтезированных сценариев представляет собой приобретение навыков выполнения действий и навыков поведения в конкретной ситуации.
Сценарии открытые. Все процессы, протекающие в памяти системы, непрерывно регистрируются в виде открытых сценариев. Обучающаяся система, имеющая понятийный отдел памяти, регистрирует свою деятельность в двух открытых сценариях – мультипериферийном и понятийном. Эти сценарии представляют собой, по существу, протокол функционирования системы. В системах, не имеющих ПОП, имеется лишь один открытый сценарий, который выполняет функции регистрации внешней информации, выполняемых системой действий и процессов мышления.
Это бесконечные сценарии. Время хранения записанной в них информации весьма ограничено в силу причин, изложенных в разделах Проводимости связей и Приоритеты элементов знаний. Это позволяет перерабатывать бесконечный поток данных при конечном объёме используемой для этого памяти.
В результате автодекомпозиции открытых сценариев порождаются конечные сценарии. Конкретные сценарии обобщаются, в результате чего порождаются обобщённые сценарии. Обобщённые сценарии впоследствии используются для распознавания классов динамических СРМ, а также для синтеза конкретных наблюдаемых и выполнимых сценариев.
Открытые сценарии – один из основных механизмов приобретения системой знаний о динамических сущностях реального мира и, что особенно важно, приобретения системой навыков поведения и мышления.
Открытые мультипериферийный и понятийный сценарии имеют некоторую специфику.
Поэтому они будут рассмотрены в разделах Открытый мультипериферийный
сценарий и Открытый понятийный сценарий.
Формирование конечных сценариев на базе открытых сценариев. В открытых сценариях со временем накапливаются повторяющиеся фрагменты. Они подвергаются автодекомпозиции, в результате чего из них выделяются эти повторяющиеся фрагменты. Из открытых сценариев выделяются также целесообразные с точки зрения глобальной цели функционирования ОС фрагменты, даже при их однократном вхождении в открытый сценарий. Критерием целесообразности фрагмента открытого сценария являются оценки, приписанные сенсорным компонентам сценария. Эти фрагменты преобразуются в самостоятельные сценарии, которые будем называть конечными мультипериферийными или понятийными сценариями. Конечные сценарии обобщаются. Этот механизм является одним из основных механизмов приобретения системой двигательных, поведенческих и мыслительных навыков.
Наблюдаемые сценарии действий. Наблюдаемые сценарии действий описывают исключительно процессы, протекающие в операционной среде. Будем различать мультипериферийные и понятийные наблюдаемые сценарии действий.
Мультипериферийный наблюдаемый сценарий действий представляет собой описание наблюдаемых процессов в терминах мультипериферийных макрокадров.
Мультипериферийные наблюдаемые сценарии действий могут использоваться для распознавания описываемого им процесса, для прогнозирования его хода, для поиска решений, для порождения на его основе других наблюдаемых (метапроцедурой аналогии) или выполнимых (метапроцедурой подражания) сценариев, а также для компоновки целостных сенсорных образов СРМ из их фрагментов, попавших в разные макрокадры. Наблюдаемые зрительные сценарии могут также использоваться для навигации при перемещении системы в операционной среде.
Разновидностью мультипериферийных наблюдаемых сценариев действий являются сценарии, представляющие собой последовательности зрительных, акустических (иногда, и тактильных – шрифт Брайля) образов символов естественного языка.
Понятийные наблюдаемые сценарии действий описывают внешние процессы в терминах терминальных понятий и ДПО.
Наблюдаемые мыслительные сценарии. Как могут возникать наблюдаемые мыслительные сценарии? Наблюдаемые сценарии действий возникают в результате наблюдения за действиями какой-либо ОС, оперирующей в той же операционной среде. Наблюдать за ходом размышлений другого человека мы не можем. Мы не можем фиксировать ход его мыслительных процессов. Поэтому можно полагать, что наблюдаемых мыслительных сценариев, ни мультипериферийных, ни понятийных, не существует.
При обучении человека выполнению каких-либо действий или процессов сознательного мышления широко применяется метод объяснения. Но при этом ни сценарии действий, ни мыслительные сценарии обучаемой системой не формируются. Эти объяснения фиксируются в ПОП в виде последовательности ДПО.
Сценарии действий или мыслительные сценарии начинают формироваться лишь тогда, когда обучаемая система начинает выполнять действия или мыслительные операции в соответствии с запомненным объяснением.
Общие сведения. Исполнительными элементами выполнимых сценариев могут быть а) эффекторы, выполняющие воздействия на операционную среду, включая органы жизнеобеспечения самой ОС, б) управляющие метаэлементы, выполняющие управление процессами, протекающими в памяти системы.
В соответствии с этим все выполнимые сценарии можно подразделить на сценарии действий и мыслительные сценарии.
Выполнимые сценарии действий. Выполнимые сценарии действий описывают двигательно-биохимические действия, которые способна выполнять система. Этими действиями система воздействует на операционную среду.
Эффекторы можно подразделить на двигательные и биохимические. Во многих сценариях задействованы и двигательные и биохимические эффекторы. В зависимости от вида задействованных в сценарии эффекторов, сценарии действий будем подразделять на двигательные, биохимические и двигательно-биохимические.
Сценарии действий подразделяются на мультипериферийные и понятийные.
Выполнимые мыслительные сценарии. Выполнимые мыслительные сценарии описывают порядок мыслительного возбуждения декларативных и сценарных образов, выполняемого в ходе выполнения процессов сознательного мышления. Они описывают выполнение стереотипных мыслительных операций. Мыслительные сценарии выполняют разного рода манипуляции содержащимися в памяти системы элементами знаний и образами. Выполняемые мыслительными сценариями действия не воздействуют непосредственно на операционную среду. Возбуждение этих элементов вызывает выполнение тех или иных операций в памяти системы.
Непременным компонентами мыслительных сценариев являются управляющие метаэлементы. Любой процесс сознательного мышления непременно включает в себя возбуждение управляющих метаэлементов и восприятие сигналов от них. Управляющие метаэлементы будем рассматривать как эффекторы особого вида. Их возбуждение осуществляют либо диспетчер памяти, либо мыслительные сценарии.
Это даёт основание полагать, что все мыслительные сценарии – выполнимые сценарии.
Возбуждение этих метаэлементов позволяет осуществлять анализ возникающих ситуаций в памяти системы, составлять альтернативные множества ЭЗ определённого вида и последовательно выбирать элементы этих множеств, управлять маршрутизацией процессов сознательного мышления в среде образов, представленных в памяти системы, инициировать выполнение мыслительных процессов и выполнение действий в том или ином режиме, останавливать, приостанавливать на время выполнение процессов, возобновлять выполнение ранее прерванных процессов, организовывать пошаговое выполнение процесса мышления или действия, изменять интенсивность (силу) и скорость выполнения действий, и т.п.
Компонентами мыслительных сценариев являются, помимо управляющих метаэлементов, терминальные и производные понятия. В мыслительных сценариях они играют роль сенсорных компонентов. Они возбуждаются афферентно в ходе
внешнего афферентного возбуждения, а также вследствие эфферентного возбуждения
других компонентов сценария и управляющих метаэлементов. Например, если вследствие эфферентного возбуждения управляющего метаэлемента возбуждается какая-либо оценка, то от неё афферентно возбуждаются понятие, описывающее знак оценки, и понятие, описывающее её величину. Это могут быть понятия типа <хорошо>/<плохо>.
Все мыслительные операции, выполняемые системой, регистрируются в открытом понятийном сценарии, из которого впоследствии выделяются конечные мыслительные сценарии. Это один из основных механизмов приобретения мыслительных сценариев, т.е. навыков, мышления.
Условность разделения выполнимых сценариев на сценарии действий и мыслительные сценарии. Разделение сценариев на сценарии действий и мыслительные сценарии условно, поскольку есть основания допустить существование выполнимых сценариев, в состав которых входят исполнительные элементы обоих видов. Например, у специалистов, выполняющие какие-либо ответственные или опасные действия, требующие максимального сосредоточения и внимания (например, минер, спортсмен-стрелок, футболист в момент пробития пенальти), наряду с выполнением двигательных операций выполняет большую мыслительную работу. Для этого он «отключает» приём всей «ненужной» внешней информации.
Выполнимые сценарии могут возбуждаться операционном или мыслительном режиме.
При возбуждении в операционном режиме выполняется возбуждение его терминальных эффекторных компонентов, от которых возбуждаются эффекторы. Это приводит к реальному выполнению системой действий или процессов мышления. При возбуждении выполнимого сценария в мыслительном режиме возбуждения эффекторов не происходит, что позволяет системе выполнить некоторое действие мысленно, виртуально. Такое возбуждение сценариев позволяет осуществлять их разностороннюю оценку.
Очевидно, что все остальные виды образов могут возбуждаться только в мыслительном режиме.
Можно предположить, что в системах, не имеющих ПОП, мыслительные сценарии размещаются в МПОП. Двигательно-биохимические и мыслительные процессы регистрируются в одном мультипериферийном открытом сценарии, в результате декомпозиции которого порождаются конечные сценарии, которые могут включать в себя эффекторы обоих видов.
Знания будем подразделять на конкретные и обобщённые.
Сущности реального мира по своей природе всегда конкретны (уникальны). В памяти они отображаются конкретными образами, которые порождаются в результате отображения в памяти входного и выходного потоков информации. Из конкретных элементов знаний строятся образы более сложных конкретных СРМ.
Лингвистические СРМ в сенсорном и мультипериферийном ОП отображаются конкретными образами, компонентами которых являются конкретные образы букв, морфем, слов, словосочетаний, предложений, дискурса.
Но многие лингвистические конструкции обозначают классы СРМ, т.е. являются носителями обобщённой информации. Например, слово «человек» обозначает определённый класс СРМ. Эта специфика проявляется только при отображении лингвистической информации в ПОП. При этом такая конструкция представляется в понятийном ОП также конкретным понятийным ЭЗ или образом. Связь с обобщённым образом, описывающим класс СРМ «человек» образуется иными механизмами.
Обобщённые образы порождаются на основе конкретных и обобщённых образов, содержащихся в памяти системы. Обобщённые знания – всегда порожденные знания, так как являются продуктом деятельности обучающейся системы.
Понятийные знания подразделяются на знания различных семантических классов, которые достаточно подробно рассматриваются в литературе по экспертным системам. Для целей построения ИЛБС классификация знаний по семантическому признаку интереса не представляет, поскольку знания всех семантических классов средствами АПС представляются и обрабатываются одними и теми же средствами.
Одна сущность реального мира отображается в памяти ОС в общем случае в следующих формах: сенсорной, эффекторной, мультипериферийной и понятийной.
Каждая из этих форм отображения может быть представлена совокупностью образов.
Формы отображения реального мира будем рассматривать как различные виды знаний. Будем говорить о сенсорных и т.д. знаниях. Различные формы отображения СРМ выполняют различные функции.
Сенсорные образы порождаются в результате записи в память системы информации, поступающей из операционной среды через сенсорные подсистемы.
Одна и та же СРМ отображается в памяти ОС, как правило, множеством сенсорных образов одновременно. Например, такая сущность, как самолет, может отображаться в памяти системы одновременно совокупностью зрительных образов самолета одного или разных типов, совокупностью акустических образов шума, производимого самолетом при взлете, посадке, пикировании, в полете. Каждая сенсорная подсистема осуществляет отображение определенных свойств сущностей реального мира – внешнего вида, издаваемых ими звуков, их вкуса, запаха, тактильных ощущений и т.п.
Каждый частный сенсорный отдел памяти служит для накопления, распознавания, декомпозиции, обобщения и преобразования статических сенсорных образов определённого вида. В сенсорных ЧОП содержатся конкретные и обобщённые, априорные и приобретенные сенсорные образы. Частные сенсорные ОП и их разделы могут различаться между собой перечнем используемых для представления знаний типов конструкций и перечнем метапроцедур манипулирования этими конструкциями.
Все терминальные и часть производных ЭЗ сенсорного ОП имеют априори заданную семантику. Они входят в состав априорных сенсорных, как правило, обобщённых образов, описывающих некоторые важные с точки зрения функционирования системы СРМ. Априорные сенсорные образы являются компонентами априорных сценариев, таких как безусловные рефлексы и априорные стереотипы поведения (см. разделы Рефлексы и инстинкты и Стереотипы поведения и эмоции.), а также оценочных сценариев (см. раздел Априорные оценки).
В памяти каждой частной сенсорной подсистемы формируются и накапливаются сенсорные образы определённого вида. Эти образы на каждом макротакте объединяются в моносенсорные макрокадры, совокупность которых, в свою очередь, в сенсорном ОП объединяются в мультисенсорные макрокадры.
Моносенсорный и мультисенсорный макрокадр могут содержать информацию, идентифицирующую результаты выполнения действий на одном из предыдущих макротактах, сопротивление среды, величину усилия при выполнении действия, а также, различные изменения в операционной среде в результате выполнения действий или независимо от них.
Представление сенсорной информации рассмотрим на следующих примерах.
Одной из возможных схем представления сенсорной зрительной информации может быть схема, при которой зрительный макрокадр представляет собой «И»-композицию зрительных образов проекций объектов, составляющих этот кадр. Каждая проекция объекта может быть представлена в виде «И»-композиции образов линии контура, цвета и яркости, возможно, фактуры проекции объекта и её координаты относительно проекций других объектов в зрительном кадре. Линия контура может быть представлена в виде «КР»-композиции аппроксимирующих линий контура (АЛК) в абсолютных и относительных единицах. Нельзя исключать использования для представления этих образов конструкций типа «КЗ» или «И». Аппроксимирующая линия контура в абсолютных единицах представляет собой «И»-композицию абсолютной длины этой АЛК и угла её наклона к горизонтали. Аппроксимирующая
линия контура в относительных единицах представляет собой «И»-композицию длины этой АЛК относительно длины предыдущей АЛК, и угла её наклона относительно также предыдущей АЛК.
Аналогичным образом могут быть представлены и прочие виды сенсорной информации. Так, например, тактильный макрокадр можно представить в виде «И»- ассоциации образов, каждый из которых описывает координату точки на поверхности тела ОС, величину текущего тактильного и температурного воздействия на эту точку. Таким же образом может быть представлена информация, описывающая интенсивности нейтронных потоков в разных точках активной зоны атомного реактора.
Обобщённые сенсорные образы используются для распознавания классов сущностей, например, для идентификации некоторой СРМ как человека. Кроме того, они используются для виртуальных преобразований и синтеза сенсорных образов.
Например, зрительные образы могут подвергаться разного рода плоскостным, пространственным, цветовым, масштабным и другим преобразованиям.
Сенсорные ЧОП содержат статические однородные образы. Таковыми являются сенсорные образы СРМ, моносенсорные и мультисенсорные макрокадры.
Вместе с тем при построении ИЛБС может оказаться целесообразным представлять содержимое моносенсорных макрокадров некоторых сенсорных ЧОП в виде сценариев. Примером такой подсистемы может служить акустическая сенсорная подсистема. Акустическая информация по своей природе является динамической.
Таковой является и любой её фрагмент, умещающийся в одном макрокадре. Можно предложить схему её обработки, аналогичную схеме обработки зрительной информации, которая позволяет рассматривать акустический макрокадр как статический образ. Но возможна и иная схема обработки акустической информации, при которой акустический макрокадр содержит последовательность выборок акустического сигнала. В одном акустическом макрокадре содержится множество таких выборок. Такая последовательность выборок по своей сути является сценарием, поскольку описывает некоторый процесс.
Эффекторные знания представляют собой совокупность образов двигательных и биохимических действий, которые может выполнять система.
Каждый частный эффекторный отдел памяти содержит образы процедур, выполняемых данной эффекторной подсистемой. Элементы знаний эффекторного ЧОП управляют через эффекторные кодировщики исполнительными механизмами – эффекторами.
На верхнем уровне представления знаний каждого эффекторного ЧОП размещаются идентификаторы моноэффекторных макрокадров. В эффекторном ОП они объединяются в мультиэффекторные.
Моноэффекторный макрокадр представляет собой описание атомарного действия, которое система может выполнить в течение одного макротакта эффектором этой частной эффекторной подсистемы (например, мускулом третьей фаланги указательного пальца левой руки). Моноэффекторный макрокадр представляет собой составной однородный образ типа «И», компонентами которого являются идентификатор входящего в подсистему эффектора, а также идентификатор образа, описывающих интенсивность действия, заданного для этого эффектора.
Практически любое действие выполняется не одним, а группой эффекторов.
Согласованные атомарные действия, выполняемые на одном макротакте группой эффекторов, описываются мультиэффекторными макрокадрами.
Мультиэффекторными макрокадрами описываются также атомарные действия системы в тех случаях, когда система выполняет несколько независимых действий одновременно, например, идёт и говорит.
В эффекторном ЧОП содержатся априорные и приобретённые, конкретные и обобщённые образы атомарных действий.
Специальным видом эффекторов можно считать управляющие метаэлементы (см. раздел Метаэлементы управления процессами, притекающими в памяти системы), при помощи которых ДПО и приобретённые мыслительные сценарии оказываются способными управлять протекающими в памяти системы процессами.
Все терминальные и часть производных ЭЗ эффекторного ОП имеют априори заданную семантику. Они входят в состав априорных эффекторных образов, описывающих некоторые априори заданные реакции системы на входную информацию.
В мультипериферийном отделе памяти содержатся образы следующих видов: а) мультипериферийные макрокадры (образы типа «И»); б) мультипериферийные сценарии (образы типа «КР» или «КЗ»); в) элементы знаний, каждый из которых связан с идентификаторами нескольких конкретных сенсорных образов одной СРМ.
Мультипериферийные макрокадры представляют собой «И»-композицию мультисенсорного и мультипериферийного макрокадров, зарегистрированных на одном макротакте. Мультипериферийные макрокадры являются комбинированными статическими образами. То обстоятельство, что этот образ – комбинированный, вносит в алгоритм его работы значительную специфику.
Элемент знаний, который связан с идентификаторами нескольких конкретных сенсорных образов одной СРМ, представляет собой идентификатор моносенсорного сценария. Его компоненты – статические сенсорные образы этой СРМ, зарегистрированные на последовательности смежных макрокадров. В разделе Сценарии наблюдаемые и выполнимые, однородные и комбинированные мы предположили, что моноэффекторные и мультиэффекторные сценарии не существуют, поскольку выполняемые действия всегда описываются мультипериферийными сценариями. Эффекторные макрокадры могут быть только компонентами мультипериферийных макрокадров и сценариев.
В мультипериферийном ОП, так же как и в периферийных ОП, хранятся конкретные и обобщённые, априорные и приобретенные образы.
Мультипериферийный ОП служит для регистрации, хранения и обработки мультипериферийных кадров и сценариев. В понятие обработки входит распознавание динамических сущностей реального мира, обобщение образов, конкретизация обобщённых образов, выполнение различных преобразований конкретных и обобщённых образов, синтез новых образов на базе имеющихся в МПОП образов, а также выработка и реализация реакции системы на входную информацию.
Терминальный ярус мультипериферийного ОП образуют ЭЗ, каждый из которых непосредственно связан с узлами сенсорного или эффекторного отделов памяти.
Такими ЭЗ являются идентификаторы сенсорных и эффекторных образов, моносенсорных, моноэффекторных, мультисенсорных и мультиэффекторных макрокадров. Компонентами производных мультипериферийных образов являются также идентификаторы моносенсорных, мультисенсорных и мультипериферийных сценариев.
Можно полагать, что не каждый сенсорный макрокадр непременно передаётся в мультипериферийный отдел памяти. Макрокадры, содержание которых резко отличается от смежных (предыдущих и последующих) макрокадров, в мультипериферийный отдел памяти не передаются. Это есть своего рода аппарат фильтрации недостоверной информации или информационного шума. Это, вероятно происходит с межкадровыми промежутками, которые могут попадать во внешний зрительный макрокадр при просмотре кинофильма.
Терминальный ярус мультипериферийного ОП составляют ЭЗ двух видов – с априори определённой и неопределённой семантикой. Элементы знаний второго вида приобретают семантику в ходе функционирования системы.
Часть нетерминальных ЭЗ мультипериферийного ОП также имеют априорную (наследственную) семантику. Это относится к тем терминальным ЭЗ мультипериферийного ОП, которые являются компонентами и идентификаторами априорных мультипериферийных сценариев. Эти сценарии связывают между собой априорные сенсорные и априорные эффекторные образы. Проиллюстрируем это следующим примером. Зрительный образ змеи вызывает страх. В зрительном сенсорном ЧОП имеется априорный обобщённый образ змеи, идентификатор которого связан с априорным терминальным мультипериферийным ЭЗ Sз. Кроме того, в мультипериферийном ОП имеется априорный ЭЗ Sс, который связан с идентификатором априорного мультиэффекторного образа, описывающего реакцию страха. Наконец, в МПОП имеется априорный ЭЗ Sр типа «КР», связанный с ЭЗ Sз с ЭЗ Sс.
<<Sр>> (КР) <<Sз>>, <<Sс>>.
Элементы знаний Sз, Sс, и Sр образуют априорный мультипериферийный сценарий.
Наличие таких априорных сценариев в мультипериферийном ОП обеспечивает одинаковую реакцию систем разных поколений на сходные побуждения.
Прочие нетерминальные ЭЗ мультипериферийного ОП не имеют априорной семантики. Их связи с ЭЗ периферийных отделов памяти не являются априори заданными. Они образуются и разрываются динамически в ходе функционирования системы.
Сенсорный отдел памяти выполняет, по существу, функции кодировщика информации для мультипериферийного и понятийного отделов памяти.
Важнейшим компонентом мультипериферийных знаний являются мультипериферийные сценарии, каждый из которых описывает какой-либо процесс с участием или без участия данной ОС. Мультипериферийные сценарии представляют собой последовательности макрокадров любого уровня вложенности, а также их компонентов – сенсорных, эффекторных или комбинированных.
Мультипериферийные сценарии можно подразделить на априорные и приобретённые, наблюдаемые и выполнимые, акцептированные и синтезированные, конкретные и обобщённые, нелингвистические и лингвистические, сценарии действий и мыслительные сценарии.
Будем полагать, что в системах, имеющих ПОП, мыслительных мультипериферийных сценариев нет. В таких системах мыслительные сценарии размещаются только в ПОП. Поэтому в МПОП таких систем присутствуют только сценарии действий. В системах без ПОП мыслительные сценарии являются мультипериферийными сценариями.
Наиболее удобными конструкциями для представления сценариев являются конструкции типов «КР» или «КЗ».
Наблюдаемые сценарии действий описывают исключительно внешние по отношению к системе процессы, в которых сама система активного участия не принимает, т.е. не выполняет каких-либо действий. Наблюдаемые сценарии представляют собой последовательности сенсорных образов, моносенсорных или мультисенсорных макрокадров. Моносенсорные и мультисенсорные сценарии представляют собой вырожденные мультипериферийные сценарии – сценарии, в которых отсутствуют эффекторные компоненты.
Общие сведения. Мультипериферийные сценарии, в число компонентов которых входят, помимо сенсорных, эффекторные образы, являются выполнимыми сценариями. Они описывают действия, которые способна выполнять система.
Категория выполнимых мультипериферийных сценариев действий чрезвычайно многочисленна – они описывают все априорные и приобретённые действия, которые способна выполнять система.
Выполнимые мультипериферийные сценарии описывают взаимосвязь между сенсорными образами, являющимися побуждениями к выполнению системой действий, и эффекторными образами, являющимися реакцией системы на эти побуждения. Возбуждение сенсорных компонентов сценариев может вызвать возбуждение одного из таких сценариев, результатом чего будет выполнение системой некоторого действия. В качестве инициирующих сенсорных компонентов выполнимых сценариев выступают, как правило, обобщённые сенсорные образы, что позволяет использовать один и тот же сценарий во множестве сходных ситуаций, возникающих в операционной среде.
Мультипериферийные сценарии действий обеспечивают сравнительно быстрое реагирование ОС на входную информацию. Эта реакция реализуется средствами сценариев, которые либо априорно содержатся в МПОП, либо синтезируются в ходе функционирования системы или в процессе поиска решений. Таким образом, мультипериферийный ОП представляет собой одну из основных подсистем ОС, реализующих основные поведенческие функции системы.
Кроме того, эффекторные и комбинированные компоненты мультипериферийных сценариев используются для выполнения действий понятийными сценариями действий и мышления. В этом случае обеспечивается более осмысленная, но менее оперативная реакция на входную информацию, чем при выполнении непосредственно мультипериферийного сценария.
Важным классом выполнимых мультипериферийных сценариев являются лингвистические сценарии, описывающие процессы произношения и написания лингвистических конструкций.
Априорные и приобретенные выполнимые сценарии. В мультипериферийном ОП содержатся априорные и приобретенные сценарии. Априорные сценарии представляют собой априорные оценочные сценарии, безусловные рефлексы, априорные стереотипы поведения, в том числе, эмоции. Априорные сценарии в качестве своих компонентов имеют априорные сенсорные и эффекторные образы, которые эти сценарии связывают между собой. На основе априорных сценариев в ходе функционирования системы порождаются приобретенные сценарии – приобретённые оценочные сценарии, условные рефлексы, приобретённые стереотипы поведения.
Безусловные рефлексы, эмоции и наследственные стереотипы поведения в структурном и функциональном плане почти ничем не различаются. Единственное отличие безусловных рефлексов, с одной стороны, и эмоций и наследственных стереотипов поведения, с другой, заключается в том, что выполнение рефлексов не подавляется мыслительными процессами, в то время как выполнение сценариев, реализующих эмоции и наследственные стереотипы поведения, может регулироваться и подавляться сознанием.
Приобретенными являются также сценарии поведения системы в различных ситуациях.
Они аккумулируют опыт функционирования обучающейся системы.
Вся получаемая извне системой сенсорная информация и все выполняемые системой действия регистрируются в открытом мультипериферийном сценарии, который представляет собой последовательность мультипериферийных макрокадров.
Открытый мультипериферийный сценарий регистрирует входной и выходной потоки информации в терминах сенсорных и эффекторных образов (мультипериферийных
макрокадров). На каждом макротакте функционирования системы в конец открытого сценария действий добавляется идентификатор мультипериферийного макрокадра, зарегистрированного на данном макротакте. В открытом сценарии регистрируется информация о деятельности только управляемых эффекторных подсистем. Информация о деятельности автономных эффекторных подсистем в нём не фиксируется. Открытый мультипериферийный сценарий содержит в себе, по существу, историю функционирования ОС.
В системах, не имеющих ПОП, в открытом мультипериферийном сценарии регистрируются также все выполняемые системой мыслительные процессы.
Открытый мультипериферийный сценарий – бесконечный сценарий. Большая часть компонентов открытого мультипериферийного сценария в силу причин, указанных в разделах Проводимости связей и Приоритеты элементов знаний., имеют небольшой срок хранения.
По своей природе мультипериферийная лингвистическая информация является информацией сценарного типа. Лингвистические мультипериферийные знания системы представляют собой совокупность конкретных и обобщённых сценариев, опирающиеся на сенсорные образы непроизводных и производных лингвистических конструкций (составные наблюдаемые сценарии), а также эффекторные образы произношения, написания или отображения жестами этих конструкций (выполнимые сценарии).
Мультипериферийные ЭЗ, отображающие лингвистические конструкции, опираются в сенсорном ОП на их сенсорные акустические, зрительные или тактильные образы. В эффекторном ОП они опираются на эффекторные образы, описывающие произношение фонем, написание букв (графем), или выполнение жестов.
Обобщённые лингвистические образы порождаются в результате обобщения конкретных лингвистических образов всех уровней вложенности.
Общие сведения. В приведенном выше материале мы исходили из того, что в периферийных – сенсорных и эффекторных – частных отделах памяти хранятся исключительно декларативные образы СРМ. Сценарные образы, используемые системой как образы динамических СРМ, создаются и хранятся в мультипериферийном отделе. Такое предположение обусловлено следующими соображениями.
Если допустить существование сценариев в периферийных отделах памяти, то это заметно усложняет синхронизацию двух или более моносенсорных и/или эффекторных образов одной динамической СРМ. Примерами образов таких СРМ могут служить зрительный и акустический образы летящего самолета, зрительный образ чьего-то кулака и тактильный образ в той части тела, куда пришелся удар. В мультипериферийном отделе памяти такие пары сценарных образов синхронизируются тем, что моносенсорные образы, воспринимаемые системой одновременно, образуют один мультисенсорный макрокадр. Если допустить, что мультисенсорный и мультиэффекторный сценарий являются компонентами одного мультипериферийного сценария, но существуют независимо один от другого, то это потребует более сложных методов и средств их синхронизации.
Блокировка сенсорной информации. Размещение сценариев в МПОП порождает следующую проблему. При выполнении мыслительных операций и при внимательном восприятии системой сенсорной информации определённых видов (например, зрительной или акустической) приём информации от всех или части сенсорных подсистем блокируется. Блокировка волны афферентного возбуждения может выполняться на следующих рубежах; а) «сенсоры – сенсорные ЧОП»; б) «сенсорные ЧОП – МПОП»;
в) «МПОП – ПОП».
На время блокировки на указанных рубежах прекращается инициация декларативных образов и сценариев, инициирующими компонентами которых являются образы, размещаемые в блокируемых сенсорных подсистемах. Вследствие этого система на время утрачивает способность реагировать на поступающую сенсорную информацию, которая может сигнализировать о наличии серьёзной опасности для неё.
Эта проблем усугубляется тем, что в МПОП размещаются также априорные оценочные сценарии и безусловные рефлексы. Оценки могут приписываться всем образам, в том числе, априорным и приобретённым сценариям. Значительная часть этих образов с оценками выполняют очень важные защитные функции. Если эти сценарии также имеют в качестве своих инициирующих компонентов заблокированные сенсорные образы, то блокируется инициация и этих жизненно важных сценариев. Например, если заблокировано восприятие зрительной информации, то система может не среагировать адекватно на зрительные образы, например, подползающей змеи или стремительно приближающегося автомобиля. Рассмотрим, насколько серьёзна эта проблема, и каковы пути её решения.
Если при закрытии клапанов блокируется приём всей без исключения сенсорной информации, то а) блокировка на рубеже «сенсоры – сенсорные ЧОП» блокирует возбуждение всех оценок и рефлексов; б) при блокировке афферентного клапана на рубеже «сенсорные ЧОП – МПОП» априорные оценки и безусловные рефлексы продолжают функционировать, как и при отрытых клапанах, но блокируется возбуждение только приобретённых оценок и условных оценок; в) при блокировке афферентного клапана на рубеже «МПОП – ПОП» блокируется возбуждение только приобретённых понятийных оценок и условных понятийных рефлексов.
Очевидно, что наибольшую опасность представляет случай а). Большая часть трагических ситуаций для обучающейся системы складываются при блокировке именно на этом рубеже.
Можно предположить, что при закрытии клапанов между отделами памяти априорные связи в различных ОП и между ними не блокируются. Тогда будет блокироваться инициация приобретённых оценок и условных рефлексов, размещённых в МПОП и ПОП. Они могут возбуждаться операционно только при полном снятии блокировки сенсорных подсистем. Априорные оценки и безусловные рефлексы при этом будут продолжать функционировать. Это позволяет системе реагировать на чрезвычайные ситуации, реакции на которые реализуются безусловными рефлексами. Примером такого рефлекса может служить реакция естественной ОС на зрительный образ приближающегося к ней некоторого предмета – стремительно несущегося авто или медленно подползающей змеи. Возбуждение такого образа может прервать блокировку сенсорных подсистем.
Этот механизм решения проблемы в естественных ОС дополняется следующим механизмом. В чрезвычайных ситуациях блокировка сенсорных подсистем может автоматически отключаться, даже если включена блокировка на рубеже «сенсоры – сенсорные ЧОП». Прерывание блокировки может происходить при резкой смене содержимого сенсорного макрокадра. Таким фактором могут быть резкое изменение (возрастание или снижение) уровня сенсорного сигнала (яркости света, громкости звука, температуры окружающей среды) или появления в нём нового объекта, например, птицы, пролетающей перед носом наблюдателя, смена звука музыки звуком скрипа ножа по стеклу, вкуса сладости вкусом горечи. Прохождение части сигналов, прерывающих блокировку приёма сенсорной информации, обеспечивается тем, что они проходят по априорным неблокируемым связям от сенсорных подсистем к диспетчеру памяти. Поступление таких сигналов побуждает диспетчер отключить блокировку, действующую в данный момент. Разумеется, прерывание блокировки
приёма сенсорной информации может произойти слишком поздно, что нередко случается в практике естественных ОС. Им присуще попадать под машины (и в другие переделки) в состоянии глубокой задумчивости или внимательного наблюдения за какой-либо СРМ, т.е. когда приём информации через зрительную и акустическую сенсорные подсистемы заблокирован полностью или частично.
Итак, в дальнейшем будем полагать, что сценарии действий всех видов размещаются в МПОП, поскольку имеются способы снижения присущих такой схеме недостатков, а также потому, что эти недостатки, видимо, присущи также и естественным ОС.
При построении ИЛБС остаются возможности устранить остающиеся недостатки предложенной схемы. Можно, например, в МПОП выделить низовой уровень, в котором будут размещены априорные и приобретённые сценарии, обеспечивающие безопасность системы, связь которых с сенсорными подсистемами при блокировке последних, не блокируется. К числу таковых можно относить сценарии, инициирующим компонентам которых приписаны большие отрицательные оценки.
Термин «понятие» в АПС имеет совершенно иной смысл, нежели в философии, психологии или традиционном искусственном интеллекте. Отличие это отражает объективную потребность в совершенно однозначных, не допускающих двойного толкования, терминах и понятиях, поскольку здесь речь идёт о построении реальной системы, а не об общефилософских разглагольствованиях. Разумеется, можно спорить об удачности выбранного термина. Я полагаю его применение в приведённом ниже смысле вполне уместным, поскольку оно полностью отвечает указанному выше требованию однозначности, полностью накрывает все известные мне определения «понятия», и устраняет все присущие используемым в философии, психологии и искусственном интеллекте определениям пороки.
В АПС используются два вида понятий - терминальные и производные (нетерминальные) понятия.
Терминальным понятием, обозначающим некоторую СРМ или класс СРМ, будем называть ЭЗ, который концентрирует в себе все образы – сенсорные, мультипериферийные и, следует подчеркнуть, понятийные – этой СРМ или этого класса СРМ, которые имеются в памяти системы. Атомарные действия, описываемые эффекторными образами, отображать в понятия нецелесообразно в силу их атомарности. Например, сущность, которую вербально можно условно обозначить как «удар кулаком в лицо», в памяти системы в общем случае описывается множествами образов следующих видов: а) сенсорных зрительных, акустических, тактильных, соматосенсорных, болевых образов; б) мультипериферийных наблюдаемых сценариев действий, описывающих наблюдавшиеся системой процессы этого вида; в) выполнимых сценариев действий, описывающих действия самой системы при нанесении такого удара; г) лингвистических образов, подобных приведённому выше и иных, размещённых в символьном подотделе ПОП; д) возможно, понятийных образов, описывающих, например, процесс выполнения этого действия в терминах ДПО.
Понятийный уровень представления знаний позволяют интегрировать все лингвистические и нелингвистические образы одной СРМ, которые имеет система.
Современные системы искусственного интеллекта лишены этого свойства полностью. Аппарат понятий в АПС полностью устраняет этот недостаток. Предлагаемый аппарат понятий является воплощением мечты Д.А. Поспелова об интеграции образных и символьно-логических знаний. При возбуждении понятия может выполняться возбуждение всех образов СРМ, описывающих обозначаемую данным
понятием СРМ. Тем самым понятие АПС обеспечивает исчерпывающее (для данной обучающейся системы) описание некоторой СРМ или класса СРМ.
Из терминальных понятий строятся производные конструкции – декларативные понятийные образы. Декларативные понятийные образы могут представлять собой многоярусные конструкции. Их компонентами, помимо терминальных понятий, являются ДПО. С другой стороны, ДПО могут быть компонентами терминальных понятий. Производные понятия описывают связь данного понятия с другими понятия – компонентными, включающими, а также понятиями, связанными с данным понятием ассоциативно, т.е. через общие компоненты.
Из сказанного следует, что понятия в АПС – всего лишь один из видов ЭЗ и образов.
Определения «понятия», даваемые в философии и психологии и т.п., по большей части просто ужасны. Так, в логике «понятие» определяется как «мысль, отражающая сущность предметов» (цитируется по [Гладун В.П. 1994, стр. 53]). Почему «мысль»? Что такое «сущность предметов»? И почему только «предметов»? Несколько лучше определение, данное в [Гладун В.П., 1994, стр. 53]: «Понятие – элемент системы знаний, представляющий собой модель некоторого класса элементов мира, отражённого в знаниях, с помощью которого реализуются процессы распознавания и генерации моделей конкретных элементов мира». Но возьмем обобщённый зрительный образ кота. Это элемент системы знаний? Да! Это модель класса СРМ? Да! С его помощью реализуются процессы распознавания и генерации моделей конкретных элементов мира? Несомненно! Это понятие? Нет!!! Это только обобщённый зрительный образ кота! Не совпадает смысл термина «понятие», приписываемый ему в АПС, со смыслом этого термина и в [Гладун В.П., 1987, с. 34].
Практически во всех «классических» определениях понятие рассматривается как отображение некоторого класса СРМ. Прочему только класса? Когда мы тем или иным способом воспринимаем лингвистическую конструкцию «Иннокентий Смоктуновский», у нас немедленно возникает (возбуждается) масса образов, связанных с этим лингвистическим образом. Чем это не понятие? В конце концов, единичная сущность, это просто вырожденный класс с мощностью, равной единице. Почему одно из её отображений в памяти нельзя рассматривать как понятие? И «классические» определения допускают так называемые единичные понятия.
Процитируем В.П. Гладуна: «…различают единичные понятия (объёмы которых состоят из одного элемента) и общие (объёмы которых включают более одного элемента). Единичными понятиями являются такие понятия, как, космос, скорость света, абсолютный нуль температуры и т.п.» [Гладун В.П., 1994]. Но если понятием является «скорость света», то почему понятием не может являться «Иннокентий Смоктуновский»? В отличие от приведённых выше определений, в АПС понятия обозначают не только классы СРМ, но и отдельные конкретные СРМ. Помимо того, что очень затруднительно дать ответ на вопрос, чем не понятие «Иннокентий Смоктуновский», есть и другие основания рассматривать совокупность знаний системы, релевантных этой СРМ, как понятие. Метапроцедуры отображения нелингвистических и лингвистических образов на понятийный уровень представления знаний формальны. Они инициируются и выполняются на основе синтаксических признаков отображаемых образов, безотносительно к их семантике. Эти признаки формально неразличимы для конкретных и обобщённых образов. Эти процессы протекают для образов единичных СРМ и их классов совершенно одинаково. И нет никаких формальных оснований при отображении образов на понятийный уровень представления знаний одну группу образов отображать, а другую не отображать.
Средствами подсознания отображение некоторой совокупности периферийных образов в понятие осуществляется в частности, при систематическом одновременном или последовательном с небольшим временным интервалом появлении этих образов
во входном потоке информации. Процессы порождения понятий средствами сознания гораздо сложнее. Средствами сознательного мышления могут формироваться понятия в «философско-психологическом» смысле. Но представлены они будут точно такими же образами, как и те понятия, которые сформированы исключительно метапроцедурами. И структура их ничем не различается – и те, и другие могут быть представлены в памяти системы конкретным понятийным образом, а опираться могут как на конкретные, так и на обобщенные периферийные, мультипериферийные и понятийные образы. Да и процессах мышления их роли ничем не различаются.
Терминальное понятие концентрирует в себе все известные системе образы некоторой СРМ или некоторого класса СРМ. Афферентное возбуждение любого из них должно вызывать распознавание СРМ, описываемой этим образом. Этому требованию вполне отвечают ЭЗ типа «ИЛИ/Н».
Вместе с тем, использование для этих целей конструкций \этого типа вызывает некоторые сомнения.
Элементы знаний типа «ИЛИ/Н» не возбуждаются. Поэтому неправомерно говорить о возбуждении терминального (непроизводного или производного) понятия. Элементам знаний этого типа не приписывается ни уровни возбуждения, ни приоритеты. Эти параметры приписываются его компонентам и включающим по отношению к нему ЭЗ. Терминальное понятие выполняет лишь функции коммутатора между этими ЭЗ.
Это, по существу, означает, что терминальное понятие как самостоятельный ЭЗ не существует, а является категорией виртуальной. И это логично. Если терминальное понятие – совокупность образов, то эта совокупность не может иметь ни уровней возбуждения, ни приоритета. Эти величины приписываются каждому отдельному образу, образующих это понятие.
Учреждать новый тип ЭЗ для представления терминального понятия нет необходимости. Такой образ мог бы отличаться от «ИЛИ/Н» только тем, что ему приписываются уровни возбуждения и приоритет. Но это приводит к абсурду.
Накопленный при афферентном возбуждении приоритет такого понятия буде равен сумме приоритетов его компонентов. Это означает, что приоритет терминального понятия в значительной степени определяется числом его компонентов, а это совершенно неправильно.
Отсутствие у терминального понятия приоритета не позволяет включать его в АМ/Приоритеты. Но в это множество могут включаться компоненты терминального понятия, возбуждённые в данный момент.
Терминальные понятия входят в производные понятийные образы в качестве компонентов. Идентификаторами этих образов служат ЭЗ типов «И» и «К», которым уровни возбуждения и приоритеты приписываются.
Элементы знаний типа «ИЛИ/Н» могут быть элементами эфферентного и
афферентного отражения (см. раздел Элементы афферентного и эфферентного отражения), что также делает их вполне приемлемыми для представления терминальных понятий.
Если в результате забывания у терминального понятия остаётся единственный компонент, то это терминальное понятие элиминируется, а оставшийся его компонент связывается с включающим по отношению терминальному понятию элементом знаний непосредственно.
При забывании всех компонентов терминального понятия в производном понятии сохранится «пустая» нисходящую связь, эфферентно возбуждая которую система не сможет что-либо «вспомнить».
Общие сведения. Рассмотрим понятие «хлеб». Оно концентрирует в себе терминальные понятия, которые вербально можно выразить как «вкус хлеба», «запах хлеба», «зрительный образ хлеба», «тактильный образ хлеба». Вкусу, запаху и т.п.
хлеба в памяти системы соответствуют сенсорные образы, релевантные этим лингвистическим конструкциям. Каждая пара сенсорного образа того или иного вида и его лингвистический эквивалент образуют непроизводное терминальное понятие. Последние объединяются в производное терминальное понятие «хлеб». В реальности эта конструкция сложнее, поскольку имеются разные виды хлеба – пшеничный (белый), ржаной (чёрный), бородинский (с тмином), хлеб с отрубями и т.п.
Формирование терминальных понятий. Терминальное понятие порождается в том случае, если а) в памяти системы имеется более одного образа одной СРМ; б) система в состоянии идентифицировать принадлежность этих образов одной СРМ.
Система может иметь понятие, которое опирается исключительно на нелингвистические, исключительно на лингвистические, а также на нелингвистические и лингвистические образы СРМ. Система может не иметь лингвистического образа СРМ, в потому, что она не знает его или потому, что лингвистический образ этой СРМ не существует.
Нелингвистические и лингвистические образы, не отображённые в понятия, тем не менее, могут использоваться во всех мыслительных процессах системы.
Вырожденные понятия. Если некоторая СРМ представлена в памяти только одним сенсорным, мультипериферийным или понятийным образом, то этот образ может быть непосредственным компонентом ДПО. Рассмотрим следующий образ.
<100> (И) <<Зрительный образ незнакомого человека>>, <быть показанным>, <по телевизору>.
Это человек может быть незнаком конкретному зрителю, он ранее его нигде не видел и ничего не знает о нём – ни имени, ни рода его занятий и т.п. Здесь возникают следующие естественные вопросы.
Можно ли сказать, что {Зрительный образ незнакомого человека} является понятием? Нет. Это только мультипериферийный зрительный образ СРМ. Но он является непосредственным компонентом образа <100>, что позволяет рассматривать его как вырожденное понятие. Образ <100> является понятийным образом, поскольку он размещён в ПОП. Элемент знаний <100> является производным понятием, поскольку он является идентификатором композиции компонентных образов.
Отметим, что такая же ситуация может возникнуть в силу забывания образов, являющихся компонентами периферийного сценария. Если в результате забывания у терминального понятия остаётся только один компонент – периферийный, мультипериферийный или понятийный образ – то терминальное понятие элиминируется и оставшийся образ подсоединяется к идентификатору включающего производного понятийного образа непосредственно. Это же происходит во всех прочих применениях ЭЗ типа «ИЛИ/Н».
Необходимо отметить, что рассмотренные здесь ситуации с единственным компонентом терминального понятия носят гипотетический характер. На практике любая СРМ, как правило, отображается в памяти системы сразу несколькими образами. Обычно имеется, по крайней мере, несколько зрительных образов СРМ.
Кроме того, человек незнакомому объекту или процессу стремится присвоить какое- либо название. И в приведённом выше примере незнакомый человек, показанный по телевизору, отображается, как правило, множеством зрительных и акустических образов. Исключение составляет только случай, когда показывают его портрет или фото.
Сказанное выше в полной мере относится и к следующему образу: <100 (И)> {Зрительный образ авто 1}, <столкнулся с>, {Зрительный образ авто 2}.
Лингвистические идентификаторы понятий. В философии и психологии понятия, по существу, отождествляются с лингвистическими конструкциями, используемыми для обозначения этих понятий.
В АПС, в отличие от психологии, будем исходить из того, что между понятиями и терминами, их обозначающими, имеется, как правило, очень зыбкая связь.
Лингвистические обозначения понятий ни в коем случае не могут рассматриваться как их эквиваленты. Они всего лишь один из видов образов, образующих понятия. Это не более чем более или менее (в большинстве случаев, менее) удачные лингвистические обозначения этих понятий. Понятия вполне могут возникать и существовать и без лингвистических образов, что совершенно справедливо отмечается и в [Гладун В.П., 1994].
Это надо иметь в виду при рассмотрении приведённых в данной работе примеров.
Используемые для обозначения понятий лингвистические конструкции не более чем их очень условные лингвистические обозначения. И, наверняка, не всегда самые удачные.
Терминальные понятия связываются в понятийные производные образы.
Идентификатор понятийного образа будем называть производным понятием.
Производное понятие, в свою очередь может быть компонентом терминального и другого производного понятия. Итак, понятийные производные образы строятся из терминальных и/или производных понятий.
Будем различать два основных вида понятийных производных образов – декларативные понятийные образы и понятийные сценарии.
Предварительные замечания. Сенсорные и мультипериферийные, статические и сценарные, декларативные и процедурные образы, нелингвистические и лингвистические образы в понятийный отдел памяти отображаются в виде декларативных понятийных образов.
Структура декларативного понятийного образа. При отображении периферийной информации в понятийные образы происходит изменение вида композиции компонентных ЭЗ. В периферийных образах существенной является информация о временных, плоскостных, пространственных и т.п. отношениях между компонентными сущностями, входящими в одну производную сущность. Эти отношения на периферийном и мультипериферийном уровне представления знаний отображаются метасредствами. Так, временнЫе отношения могут отображаться либо порядком следования образов в сценарии, либо сенсорными метаэлементами, отображающим связь между предыдущим и последующим образами. Плоскостные и пространственные отношения в зрительных макрокадрах отображаются координатами взаимного расположения проекций объектов в кадре.
В понятийных образах – отношение композиции учитывает лишь факт композиции компонентных идентификаторов сущностей в единый образ. Все остальные без исключения отношения на понятийном уровне представления знаний представляются понятиями. Декларативные понятийные образы в общем случае имеют следующую схему: <ДПО> (И) <антецедент>, <отношение>, <консеквент>.
В тех случаях, когда в качестве отношения выступает понятие, обозначающее действие, схема может иметь следующий вид: <ДПО> (И) <антецедент>, <отношение>.
Каждый из этих компонентов представляет собой «И»-композицию содержательного понятия и понятия-роли.
<антецедент> (И) <содержательное понятие>, <роль – антецедент>.
<отношение> (И) <содержательное понятие>, <роль – отношение>.
<консеквент> (И) <содержательное понятие>, <роль – консеквент>.
При отображении на понятийный уровень представления знаний лингвистической информации содержательное понятие опирается, как правило, на корневую морфему, а понятие-роль – на флексии и артикли. В языках с обязательным порядком слов роль определяется также позицией слова в предложении. Таким образом, понятие-роль есть не что иное, как обычное понятие.
Содержательное понятие может быть простым образом или многоярусным составным образом. Например, каждый из указанных выше компонентов ДПО может иметь основной компонент и компонент-свойство. Эти компоненты также состоят из основного понятия и понятия-роли. Вложенность понятийных образов указанной иерархией принципиально ничем не ограничивается.
Декларативные понятийные образы могут описывать различного рода действия, как последовательности некоторых операций. Для этих целей могут использоваться ДПО типа: <100> (И) <выполнить действие 1>, <затем>, <выполнить действие 2>.
Аналогичным образом на понятийный уровень представления знаний отображается и нелингвистическая информация.
Пусть, например, имеется сюжет, который вербально описывается так: «Коля сначала ударил Петю по физиономии, а затем сбил его с ног». В мультипериферийном ОП этот сюжет представляется в виде наблюдаемого сценария, в котором порядок следования событий отображается порядком следования терминальных понятий и понятийных образов. Кроме того, этот сюжет может быть представлен в виде следующей совокупности ДПО.
<100> (И) <101>, <сначала-затем-о>, <102>.
<сначала-затем-о> (И) <сначала-затем>, <роль-отношение>.
<101> (И) <Коля-а>, <ударить по физиономии-о>, <Петя-к>.
<102> (И) <Коля-а>, <сбить с ног-о>, <Петя-к>.
<Коля-а> (И) <Коля>, <роль-антецедент>.
<Петя-к> (И) <Петя>, <роль-консеквент>.
<ударить по физиономии-о> (И) <ударить по физиогномии>, <роль-отношение>.
<ударить по физиономии> (И) <10>, <11>.
<10> (И) <ударить>, <роль-действие>.
<11> (И) <по физиономии>, <роль-вид действия>.
<сбить с ног-о> (И) <сбить с ног>, <роль-отношение>.
В понятийном ОП порядок следования событий отображается отношением типа «сначала – затем». Понятие «ударил по физиономии», которое в ДПО является отношением между понятиями «Коля» и «Петя», в зрительном сценарии представляется компонентным сценарием.
Класс образов, к которому могут быть отнесены терминальные понятия и ДПО. Терминальное понятие в общем случае может опираться на сенсорные, эффекторные, мультипериферийные и лингвистические образы одной сущности реального мира. Если внешними терминальными компонентами терминального понятия являются только сенсорные или только эффекторные ЭЗ, то такое терминальное понятие будем относить к категории однородных. В противном случае терминальное понятие будем считать комбинированным.
Вид ДПО – однородный или комбинированный образ – определяется тем, на какие терминальные понятия он опирается – однородные или комбинированные. Поэтому разные ДПО могут быть отнесены к категории как однородных, так и комбинированных образов.
Из того факта, что то или иное терминальное понятие или тот или иной ДПО являются комбинированными образами, не следует, что эти образы являются выполнимыми образами. Напомним, что выполнимыми являются только сценарии, компонентами которых являются эффекторные компоненты. Ни терминальные сценарии, ни ДПО, сценариями не являются. Это декларативные образы.
Выделение выполнимых сценариев в отдельную категорию важно с практической точки зрения в том плане, что образы, не являющиеся выполнимыми сценариями возбуждаются только в мыслительном режиме, в то время как выполнимые сценарии могут возбуждаться также в операционном режиме (см. раздел Операционное и мыслительное возбуждение выполнимых сценариев).
Декларативные понятийные образы возбуждаются только в мыслительном режиме. Но волна мыслительного эфферентного возбуждения, проходящая через ДПО при выполнении процессов сознательного мышления, при определённых условиях может трансформироваться в волну операционного возбуждения мультипериферийного выполнимого сценария.
Понятийные сценарии, как декларировалось в разделе Виды сценариев, будем подразделять на а) открытый и конечные; б) наблюдаемые и выполнимые; в) сценарии действий и мыслительные сценарии; г) акцептированные и синтезированные.
В понятийных сценариях, так же как и в мультипериферийных сценариях, отношение между их компонентами реализуется метаотношением следования – метаотношением типа «К».
Так же как и в мультипериферийном отделе памяти, в понятийном отделе памяти имеется открытый понятийный сценарий. В нём регистрируется последовательность возбуждения всех понятийных образов и управляющих метаэлементов в процессе функционирования ПОП, т.е. регистрируются входной и выходной потоки информации (см. раздел Входной и выходной потоки информации) в терминах понятий и управляющих метаэлементов.
Открытый понятийный сценарий имеет одно существенное отличие от мультипериферийного открытого сценария. В мультипериферийный открытый сценарий на каждом макротакте выполняется запись текущего макрокадра. В открытый понятийный сценарий осуществляется запись только полностью афферентно или эфферентно возбуждённых ЭЗ – понятий, а также сигналов поступающих от управляющих метаэлементов или выдаваемых им. Возбуждение идентификаторов мультипериферийных и понятийных сценариев, а также лингвистических конструкций требует множества макротактов. Полное возбуждение понятий, опирающихся на идентификаторы этих образов, происходит только при полном возбуждении периферийных и мультипериферийных образов. Это означает, что запись понятий в открытый понятийный сценарий может происходить не на каждом макротакте. Но для корректной регистрации мыслительных процессов этого и не требуется. Помимо прочего, это позволяет хранить в открытом понятийном сценарии протокол событий, охватывающий гораздо больший отрезок времени, чем это имеет место в случае мультипериферийного открытого сценария. Но достигается это в ущерб детализации описания процессов.
Этот механизм является одним из основных механизмов приобретения системой мыслительных навыков.
Наблюдаемые понятийные сценарии действий. Наблюдаемые понятийные сценарии действий, так же как и мультипериферийные сценарии действий, содержат описания процессов, протекающих в операционной среде. Отличие заключается в том, что понятийные сценарии описывают эти процессы не в терминах сенсорных, эффекторных и мультипериферийных образов, а в терминах терминальных и
производных понятий. В состав этих сценариев управляющие метаэлементы- контроллеры не входят.
Наблюдаемый понятийные сценарии действий представляют собой описание последовательности возбуждения терминальных понятий и понятийных образов, выполняемого в результате обработки в ПОП входного потока информации.
Например, система наблюдает столкновение двух автомобилей. На мультипериферийном уровне это событие регистрируется последовательностью сенсорных образов – зрительных и акустических. А на понятийном уровне это событие регистрируется в виде последовательности ДПО, которые фиксируют не только факт самого столкновения, но и события, предшествовавшие столкновению и последовавшие за ним.
Основное назначение наблюдаемых понятийных сценариев заключается в регистрации процессов, протекающих в памяти системы. Кроме того, понятийные наблюдаемые сценарии могут входить в состав понятийных выполнимых сценариев действий и понятийных выполнимых мыслительных сценариев.
Наблюдаемые понятийные мыслительные сценарии. В разделе Наблюдаемые мыслительные сценарии было показано, что наблюдаемые мыслительные сценарии и, следовательно, понятийные наблюдаемые мыслительные сценарии, не существуют.
Выполнимые понятийные сценарии действий. К числу понятийных выполнимых сценариев действий будем относить приобретённые понятийные оценки и условные понятийные рефлексы. Вопрос об описании средствами понятийных сценариев выполняемых системой действий прочих видов в настоящее время остаётся открытым. Понятийные сценарии действий лишь несколько дополняют множество мультипериферийных приобретённых сценариев-оценок и условных рефлексов.
Компонентами понятийных сценариев действий являются терминальные и производные понятия, идентификаторы компонентных понятийных сценариев действий, сенсорные и эффекторные образы. Эффекторные компоненты, выполняющие описываемые этими сценариями действия, могут быть непосредственными компонентами понятийных сценариев действий.
Выполнимые понятийные мыслительные сценарии. Важной разновидностью понятийных сценариев являются выполнимые понятийные мыслительные сценарии, играющие чрезвычайно важную роль в мышлении и управлении процессами, протекающими в памяти системы. Приобретая мыслительные сценарии, система приобретает навыки мышления при решении типовых задач. При этом приобретаются также навыки сознательного управления интенсивностью и скоростью выполняемых действий, а также, что особенно интересно и важно, навыки управления процессами мышления.
Компонентами понятийных мыслительных сценариев являются терминальные и производные понятия, идентификаторы компонентных понятийных мыслительных сценариев и сценариев действий, а также метаэлементы управления процессами,
притекающими в памяти системы).
Процессы сознательного мышления реализуются
а) метапроцедурой прогностического сознательного горизонтального возбуждения (см. раздел Метапроцедура прогностического сознательного мыслительного горизонтального возбуждения (СМГВ-П)), управляющей мыслительным
возбуждением образов;
б) метапроцедурой операционного горизонтального возбуждения мыслительных сценариев (см. раздел Метапроцедура операционного горизонтального возбуждения мыслительных сценариев (ОГВ-СМ)).
Процессы сознательного мышления будем называть также процессами сознательного горизонтального возбуждения (СМГВ).
Целесообразность существования понятийного уровня представления знаний как системы взаимосвязанных понятий и понятийных образов может вызвать сомнения.
Может быть, в нём нет нужды? Может быть, достаточно сенсорного, мультипериферийного и лингвистического уровней представления знаний? В этом разделе приведём некоторые соображения в пользу существования понятийного уровня представления знаний. Возможно, существуют и другие, пока ещё не очевидные соображения.
понятийного уровня представления знаний у человека. Запоминание понятийной и периферийной лингвистической и нелингвистической информации. Наш личный опыт во многом свидетельствует в пользу существования понятийного отдела памяти. Например, хорошо понятый материал человек может через некоторое время толково пересказать, не теряя даже деталей. Но, если человек не имеет специальной подготовки, то ему едва ли удастся это сделать дословно. Лучше запоминается, как правило, смысл, а не конкретные лингвистические конструкции.
То же можно сказать и о восприятии и запоминании нелингвистической информации. Например, в рассказе о футбольном матче на следующий день будут фигурировать, в первую очередь, наиболее семантически важные события. А это значит, что из сенсорных и мультипериферийных образов фрагментов матча была извлечена семантическая составляющая.
Преобразование нелингвистической информации в лингвистическую форму. Человек может обсуждать с приятелем футбольный матч, который они наблюдали по телевизору накануне вечером. Обсуждение протекает, разумеется, в вербальной форме. Но матч ведь воспринимался ими в виде последовательности сенсорных, в основном зрительных, т.е. нелингвистических образов. Для преобразования нелингвистической информации в лингвистическую форму необходим аппарат, позволяющий выполнять такое преобразование. Представляется, понятийный отдел памяти является идеальным воплощением такого аппарата.
Мысль и слово. Одну и ту же мысль можно изложить различными словами. Мысль возникает гораздо быстрее, чем её удается сформулировать. Более того, мысль часто бывает нелегко толково выразить словами.
Интеграция всех лингвистических и нелингвистических образов одной СРМ или класса СРМ. Основным назначением понятийного уровня представления знаний является интеграция всех лингвистических и нелингвистических образов одной СРМ или класса СРМ. Это позволяет оперировать единым понятийным образом СРМ при выполнении различных мыслительных операций, не теряя при этом возможности вовлекать в процесс мышления любой образ данной СРМ или любую их совокупность. Концентрация при помощи одного ЭЗ всех имеющихся в памяти ОС образов одной сущности реального мира значительно расширяет возможности описания операционной среды и упрощает мыслительные процессы.
Это коренным образом отличает ЭЗ и образы понятийного ОП от ЭЗ и образов сенсорного и мультипериферийного ОП. Разные сенсорные образы одной СРМ остаются разными образами даже после обобщения образов, входящих в одно МАО.
Рассмотрим следующий пример.
{вкус пшеничного хлеба} (И) {константная часть вкуса хлеба}, {специфика вкуса пшеничного хлеба.}.
{вкус ржаного хлеба} (И) {константная часть вкуса хлеба}, {специфика вкуса ржаного хлеба.}.
------------------------------------------------------------------------------------------------- {вкус хлеба} (ИФ) {константная часть вкуса хлеба}, {200}.
{200} (ИЛИ/Н) {специфика вкуса пшеничного хлеба.}, {специфика вкуса ржаного хлеба.}.
========================================================= {аромат пшеничного хлеба} (И) {константная часть аромата хлеба}, {специфика аромата пшеничного хлеба.}.
{аромат ржаного хлеба} (И) {константная часть аромата хлеба}, {специфика аромата ржаного хлеба}.
------------------------------------------------------------------------------------------------- {аромат хлеба} (ИФ) {константная часть аромата хлеба}, {201}.
{201} (ИЛИ/Н) {специфика аромата пшеничного хлеба}, {специфика аромата ржаного хлеба}.
Образы {вкус хлеба} и {аромат хлеба} могут быть объединены только терминальным понятием <хлеб>.
Покажем, что обобщённые мультипериферийные образы также не позволяют объединить все образы одной СРМ. Пусть учитель обучает ребёнка азбуке. Он показывает ему одно начертание буквы «а» и произносит звук «а». Затем он показывает другое начертание буквы «а» и снова произносит звук «а».
<<100>> (КР) <<начертание 1 буквы «а»>>, <<звук «а»>>.
<<101>> (КР) <<начертание 2 буквы «а»>>, <<звук «а»>>.
<<начертание 1 буквы «а»>> (КР) {начертание 1 буквы «а»}, {начертание 1 буквы «а»}, {начертание 1 буквы «а»}… <<начертание 2 буквы «а»>> (КР) {начертание 2 буквы «а»}, {начертание 2 буквы «а»}, {начертание 2 буквы «а»}… Образы 100 и 101 – мультипериферийные сценарии. В результате их обобщения порождается следующий фрейм: <<300>> (КРФ) <<202>>, {звук «а»}.
<<202>> (ИЛИ/Н) <<начертание 1 буквы «а»>>, <<начертание 2 буквы «а»>>.
Ни этот фрейм, ни образ 200 не концентрируют в себе все известные системе образы СРМ «буква «а»».
В результате отображения образов в ПОП формируется терминальное понятие: <буква а> (ИЛИ/Н) {начертание 1 буквы «а»}, {начертание 2 буквы «а»}, {звук «а»}.
Из этих примеров вытекает ряд важных следствий 1. Лингвистическое представление никак не может заменить понятийное представление. Понятие может порождаться в том случае, когда ему не может быть сопоставлен его лингвистический образ в силу того, что а) он не известен системе, б) эта СРМ не имеет в данном естественном языке лингвистического обозначения.
В приведённых выше примерах в памяти системы отсутствуют лингвистические образы понятий <хлеб> и <буква «а»>. Понятия, тем не менее, могут порождаться.
Если допустить, что понятийная информация представляется при помощи лингвистической информации, то совершенно непонятно, как с её помощью отображать невербализуемые образы.
2. Наличие лингвистического аппарата не является непременным условием наличия у ОС понятийного уровня представления знаний. Понятия могут формироваться у детей ещё до того, как они научатся говорить, а также у животных, стоящих на разных ступенях эволюционного развития.
Устранение недостатков, присущих лингвистической информации. Понятийный уровень представления знаний позволяет устранить недостатки, присущие лингвистическому представлению информации. Во всяком случае, введение понятийного уровня даёт механизм простого и прозрачного решения всех этих проблем.
Отображение лингвистической информации на понятийный уровень представления знаний позволяет достичь следующих целей: - элиминирование синонимии, полисемии и омонимии;
- отображение в семантически полные понятийные образы эллиптических лингвистических конструкций; - означивание анафорических ссылок; - интерпретация идиом; - эксплицирование пресуппозиции; - переход от грамматических времён к реальному времени; - устранение рода слов.
Системы семантического поиска информации, работающие исключительно с текстовой информацией, также устраняют эти недостатки ЕЯ. Но они выполняют эту работу многократно, на каждом цикле поиска информации. Введение понятийного уровня представления знаний позволяет выполнить эту работу на стадии обучения системы. Семантическая обработка информации в реальном времени осуществляется в комфортной среде синтаксически однородных понятийных образов, лишённых указанных выше недостатков.
Удобная среда выполнения мыслительных процессов. Понятия и понятийные образы являются конструкционным фундаментом процессов мышления. Анализ мыслительных процессов показывает, что понятийный уровень представления знаний является удобной средой выполнения мыслительных процессов, в том числе, поиска решений, когнитивных процессов на понятийном уровне, включая генерацию новых понятий.
Понятийный уровень представления знаний является конструктивным фундаментом понятийных сценариев действий и, что особенно важно, мыслительных сценариев, которые аккумулируют в себе мыслительные навыки системы.
Наличие понятийного уровня представления знаний облегчает вербальное обучение, при котором вербальная информация является носителем понятийной информации. В частности, на основе вербального описания могут формироваться мультипериферийные и понятийные образы, в том числе сценарии действий и мышления.
Индивидуальный характер понимания понятий. Понятие в АПС удовлетворяет требованию В.П. Гладуна [Гладун В.П., 1994, стр. 53]: «В каждый момент времени состояние системы понятий отражает индивидуальный опыт её носителя. Поэтому отдельные понятия и система понятий в целом субъективны».
Схема понятия в АПС объясняет, почему это так. Даже если какое-то понятие у двух ОС могут в основном совпадать, в некоторых деталях они непременно различаются, поскольку набор образов одной СРМ или класса СРМ у них полностью совпадать никогда не будет.
Динамичность понятий. «Системы понятий динамичны. Состав понятий меняется в результате взаимодействия их носителей с окружающей средой, а также в процессе решения задач» [Гладун В.П., 1994, стр. 53]: Понятие в АПС удовлетворяет и этому требованию. В самом деле, состав образов сущностей реального мира постоянно модифицируется, так же как и состав понятийных образов, описывающих их взаимосвязи.
Общие сведения. Непроизводными символами естественного языка (ЕЯ) являются буквы, знаки препинания и прочие вспомогательные символы этого ЕЯ. Из них строятся производные лингвистические конструкции всех уровней – буквосочетания, морфемы, слова, словосочетания, предложения простые и сложные, дискурсы.
Один непроизводный символ может иметь множество начертаний (графем) этого символа в разных шрифтовых гарнитурах, множество рукописных начертаний, множество акустических образов (фонем), тактильные представления (шрифт Брайля), несколько мультипериферийных образов его произношения и написания.
Соответственно, все производные символы также могут иметь все указанны формы представления.
Каждая форма представления каждого непроизводного и производного символа представляют собой различные лингвистические СРМ. Каждая лингвистическая СРМ отображается в сенсорном и мультипериферийном ОП отдельным образом. Зрительные образы непроизводных и производных лингвистических СРМ небольшой длины (в силу попадания их в один зрительный кадр) размещаются в зрительном сенсорном ЧОП. В мультипериферийном ОП размещаются наблюдаемые сценарии, описывающие зрительные образы производных лингвистических конструкций относительно большой длины, акустические и тактильные образы непроизводных (фонем) и производных лингвистических символов. Там же размещаются выполнимые сценарии написания и произношения непроизводных и производных лингвистических символов. Обратим внимание на то, что в сенсорном и мультипериферийном ОП каждый экземпляр одного непроизводного или производного символа отображается отдельным образом.
Вместе с тем, в памяти системы имеются также ЭЗ, каждый из которых концентрирует в себе образы всех известных системе экземпляров одного непроизводного символа. Из этих ЭЗ строятся образы производных лингвистических конструкций. При построении последних используются также идентификаторы образов производных лингвистических конструкций. Существуют также ЭЗ, каждый из которых концентрирует в себе все имеющиеся образы одной производной лингвистической конструкции – сенсорные, мультипериферийные и указанные выше идентификаторы производных лингвистических образов.
Очевидно, что для целей представления идентификаторов этих образов-концентраторов целесообразно использовать ЭЗ типа «ИЛИ/Н». Это роднит лингвистические ЭЗ- концентраторы с понятиями. Это обстоятельство делает целесообразным размещение этих ЭЗ в понятийном отделе памяти. Подчеркнём, что эти ЭЗ-концентраторы, с одной стороны, полностью абстрагированы от конкретной формы непроизводного или производного символа, обозначаемого данным ЭЗ, и, с другой стороны, связан с образами всех известных системе форм представления этого символа.
В то же время, эти ЭЗ понятиями не являются, поскольку не концентрируют в себе нелингвистческие образы СРМ, обозначаемой данным лингвистическом символом. Каждый из них является компонентом терминального понятия, идентифицирующего СРМ – непроизводный символ или производную лингвистическую конструкцию.
Отнесение значительной части лингвистических образов к сфере компетенции
понятийного отдела памяти означает, что ПОП необходимо разделить на два подотдела, которые в разделе Структура понятийного отдела памяти мы условились
называть символьным (лингвистическим) и понятийным подотделами понятийного отдела памяти (СПОП и ППОП, соответственно).
Символьный подотдел понятийного отдела памяти. Терминалами символьного подотдела ПОП являются ЭЗ, каждый из которых концентрирует в себе все сенсорные и мультипериферийные образы всех известных системе экземпляров одного непроизводного или производного символа ЕЯ. Терминальные ЭЗ символьного подотдела ПОП реализуются элементами знаний типа «ИЛИ/Н».
Терминальные ЭЗ лингвистического подотдела ПОП и идентификаторы производных лингвистических конструкций являются компонентами терминальных понятий – терминальных ЭЗ понятийного подотдела ПОП.
Терминальный ярус символьного подотдела ПОП формируется динамически по мере приобретения знаний. Роль кодировщиков понятийной информации играют сенсорный и мультипериферийный ОП.
В символьном подотделе ПОП происходит накопление и обработка символьной, прежде всего, естественно-языковой информации. В ней хранятся текстовые фрагменты, запомненные системой «наизусть». Прочая естественно-языковая информация большой стабильностью не отличается и довольно быстро забывается.
Конкретные лингвистические образы, размещённые в этом подотделе, подвергаются декомпозиции и обобщению. Конкретные и обобщённые лингвистические образы
уровней морфемы, слова, словосочетания, предложения и дискурса отображаются в терминальные понятия понятийного подотдела ПОП, которые опираются также на периферийные, мультипериферийные и понятийные нелингвистические образы сущностей реального мира. Совокупность обобщенных лингвистических образов образуют, по существу, грамматические правила естественного языка. Конкретные лингвистические конструкции могут описывать исключения из этих правил.
В лингвистическом подотделе ПОП могут автоматически формироваться грамматические правила нескольких естественных языков.
Эти обобщённые образы используются для распознавания лингвистических СРМ, контроля их корректности, выделения из входного потока лингвистической информации семантически значащих лингвистических единиц, а также для синтеза естественно-языковых конструкций, в том числе таких, которые никогда не поступали на вход данной ОС.
Понятийный подотдел понятийного отдела памяти. Терминалами понятийного подуровня ПОП являются терминальные понятия, каждый из которых концентрирует в себе все нелингвистические и лингвистические сенсорные, эффекторные и мультипериферийные, а также понятийно-лингвистические и понятийные образы СРМ. Эти терминальные понятия являются компонентами образов декларативных понятийных и сценарных понятийных образов.
Терминальный ярус понятийного подотдела ПОП формируется динамически по мере приобретения знаний. Роль кодировщиков понятийной информации играют сенсорный и мультипериферийный ОП, а также символьный подотдел ПОП.
Помимо терминальных понятий понятийный подотдел ПОП содержит декларативные понятийные образы, открытый понятийный сценарий, конечные понятийные наблюдаемые и выполнимые сценарии действий и мышления.
Из изложенного выше видно, что модель реального мира в памяти ОС представляет собой многоярусную иерархическую сеть, которая является отражением многоярусной структуры реального мира. В этой сети идентификаторы одних образов являются компонентами других образов. Мультипериферийные образы одной СРМ опираются на сенсорные и эффекторные образы этой СРМ, а понятийный образ этой СРМ – на все её сенсорные, эффекторные, мультипериферийные, лингвистические и понятийные образы.
Многоярусный характер образы приобретают вследствие следующих причин.
Во-первых, причиной возникновения многоуровневой структуры образов является наличия периферийного, мультипериферийного и понятийного уровня представления знаний.
Во-вторых, многоуровневая структура образа может определяться природой описываемой им СРМ. Она может быть отображением структуры входного потока информации, состоящего из совокупности ассоциаций, в том числе составных. Например, зрительный образ некоторой сцены может быть представлен в виде композиции зрительных образов составляющих её объектов, каждый из которых, в свою очередь, представляет собой композицию линии контура проекции, цвета, яркости, фактуры проекции объекта и её координаты в кадре относительно других проекций объектов. Каждый из этих компонентов может также быть композицией компонентных образов. Понятия в ПОП представляют собой композицию понятий разных ролей и разных уровней сложности.
Наконец, причиной возникновения многоуровневой структуры образов является декомпозиция образов, которая является одним из наиболее мощных метамеханизмов приобретения знаний о структуре СРМ, взаимосвязи сущностей реального мира и их компонентов с другими СРМ и их компонентами. В результате декомпозиции образов в их компонентных ассоциациях выделяются невырожденные константные
субассоциации, которые входят в несколько включающих образов. Декомпозиция образов приводит к созданию дополнительных ЭЗ между терминальными компонентами образа и его идентификатором. Эти ЭЗ являются идентификаторами образов, компонентными по отношению к исходному образу. Компонентные образы и их связи между собой и исходным образом представляют собой знания, приобретенные системой в процессе декомпозиции исходного образа.
Предложенная организация представления знаний в виде совокупности различных форм отображения реального мира в памяти позволяет отображать в ней сущности в виде элементов знаний и образов разного уровня полноты описания, начиная с простейших сенсорных и эффекторных ЭЗ и заканчивая понятиями. Такая схема представления знаний позволяет, с одной стороны, реализовать ввод информации о реальном мире и воздействия системы на реальный мир сравнительно простыми средствами. С другой стороны, эта схема позволяет автоматически строить сколь угодно сложные образы сущностей реального мира.
Приведённой выше структуре знаний должна соответствовать среда представления знаний, образующая память обучающейся системы. Память системы, в целом, и каждый её отдел, в частности, представляет собой многоярусную иерархическую сеть, компонентами которой являются узлы и связи между ними. Это до некоторой степени роднит её с нейронными сетями. Поскольку память ОС представляет собой сетевую конструкцию, будем называть её также сетью.
Высокая степень ассоциативной связности узлов сети. Конструкции представления знаний, декларируемых в рамках АПС-2010, и структура памяти ОС обеспечивают высокую степень ассоциативной связности узлов сети за счет наличия явных связей между ними. Это позволяет эффективно реализовывать процессы ассоциативного доступа к элементам знаний, что, в свою очередь, обеспечивает эффективную реализацию всех метапроцедур, необходимых для функционирования ОС, в том числе, когнитивных метапроцедур (декомпозиции, обобщения образов, порождения образов по аналогии и подражания и т.д.), а также процессов поиска решений.
Эта конструктивная особенность АПС обусловливает высокий уровень параллелизма потоков информации и управления. Именно чрезвычайно высокой степенью параллелизма процессов, протекающих в нейронных сетях, объясняется их невероятно высокую производительность при решении широкого класса задач.
Особенно впечатляет эта производительность с учётом очень низкой скорости распространения сигналов в нейронных сетях и низкого быстродействия составляющих их нейронов [Захарченко В.М., с. 3, 6].
Уникальность ассоциаций в памяти обучающейся системы. Каждая невырожденная ассоциация, являющаяся компонентной ассоциацией образа, уникальна, т.е. любая ассоциация ЭЗ существует в памяти ОС в единственном экземпляре. В другие образы эта ассоциация входит при помощи идентификатора образа, основанием которого является эта ассоциация. Такое представление информации в памяти системы является следствием пирамидальной структуры образов, при которой каждый производный ЭЗ опирается на уникальную компонентную ассоциацию. Уникальность образов не нарушается даже вследствие множественной их декомпозиции. Это обстоятельство обусловливает практически не избыточное представление информации в памяти ОС. Нетрудно видеть, что пирамидальная схема представления знаний реализует хранение информации с максимальной степенью её сжатия.
Комплекс знаний системы (образов СРМ), хранящихся в её памяти, представляет собой связанную систему элементов знаний, в которой через понятия и понятийные образы связанными между собой оказываются практически все ЭЗ и образы. Под ассоциативным расстоянием между двумя ЭЗ будем понимать число связей, лежащих
на кратчайшем маршруте между этими ЭЗ. Это определение не вполне строгое. Строгое определение этого понятия требует введения некоторых других понятий, которые в данном обзоре не рассматриваются.
Память системы представляет собой иерархическую сеть, узлы размещаются послойно.
Эти слои узлов будем называть физическими ярусами сети.
Знания (образы), содержащиеся в памяти системы также образуют многоярусную сеть.
Ярусы, которые образуют хранящиеся в памяти образы, будем называть логическими.
Можно было бы считать, что физические и логические ярусы совпадают. Однако, тому есть одно серьёзное препятствие. Дело в том, что логические ярусы очень подвижны в силу декомпозиции образов (см. раздел Метапроцедура декомпозиции образов). Любая группа образов может подвергнуться декомпозиции в любой момент жизни системы. Декомпозиция образов связана с появлением в декомпозируемом образе промежуточных ЭЗ, т.е. с изменением ярусной структуры декомпозируемых образов. Эти изменения влекут серьёзную (и, потому, трудоёмкую) перестройку сети. Эта трудоёмкость возрастает, если обеспечивается совпадение физических и логических ярусов в сети. Поэтому в дальнейшем в данной работе будем полагать, что физические и логические ярусы никак не связаны. В дальнейшем изложении под ярусами сети будем понимать исключительно логические ярусы.